 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Factored MDPs with Continuous and Discrete Variables
Paper and Code
Jul 11, 2012
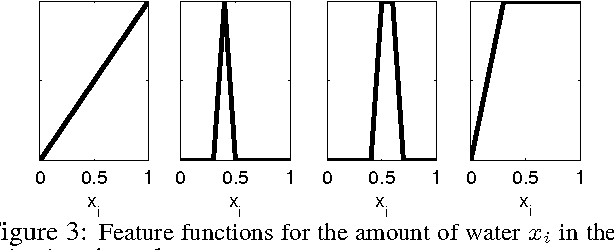

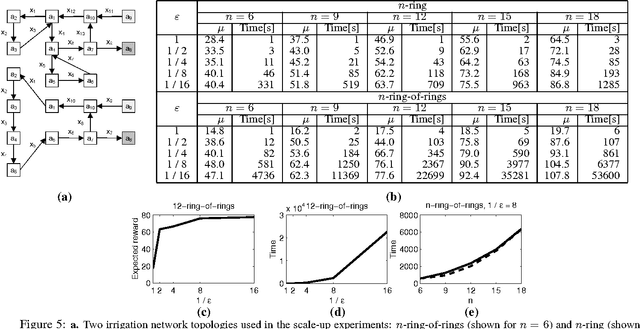
Although many real-world stochastic planning problems are more naturally formulated by hybrid models with both discrete and continuous variables, current state-of-the-art methods cannot adequately address these problems. We present the first framework that can exploit problem structure for modeling and solving hybrid problems efficiently. We formulate these problems as hybrid Markov decision processes (MDPs with continuous and discrete state and action variables), which we assume can be represented in a factored way using a hybrid dynamic Bayesian network (hybrid DBN). This formulation also allows us to apply our methods to collaborative multiagent settings. We present a new linear program approximation method that exploits the structure of the hybrid MDP and lets us compute approximate value functions more efficiently. In particular, we describe a new factored discretization of continuous variables that avoids the exponential blow-up of traditional approaches. We provide theoretical bounds on the quality of such an approximation and on its scale-up potential. We support our theoretical arguments with experiments on a set of control problems with up to 28-dimensional continuous state space and 22-dimensional action space.