 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Challenging Control Problems Using Two-Staged Deep Reinforcement Learning
Paper and Code
Sep 27, 2021
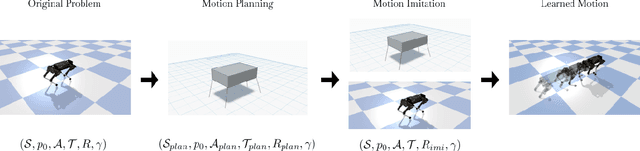
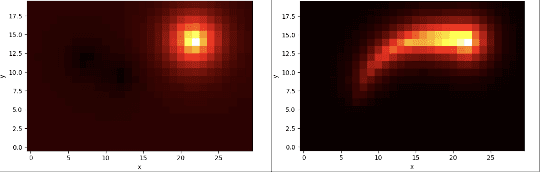
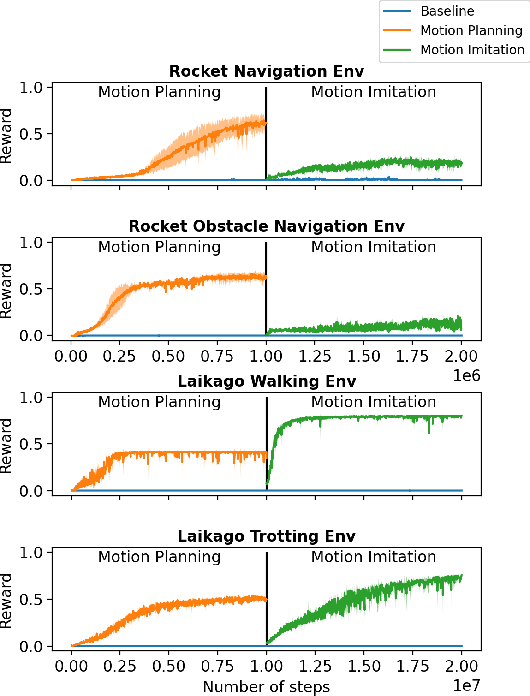
We present a two-staged deep reinforcement learning algorithm for solving challenging control problems. Deep reinforcement learning (deep RL) has been an effective tool for solving many high-dimensional continuous control problems, but it cannot effectively solve challenging problems with certain properties, such as sparse reward functions or sensitive dynamics. In this work, we propose an approach that decomposes the given problem into two stages: motion planning and motion imitation. The motion planning stage seeks to compute a feasible motion plan with approximated dynamics by directly sampling the state space rather than exploring random control signals. Once the motion plan is obtained, the motion imitation stage learns a control policy that can imitate the given motion plan with realistic sensors and actuations. We demonstrate that our approach can solve challenging control problems - rocket navigation and quadrupedal locomotion - which cannot be solved by the standard MDP formulation. The supplemental video can be found at: https://youtu.be/FYLo1Ov_8-g