 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOCRATES: A Stereo Camera Trap for Monitoring of Biodiversity
Paper and Code

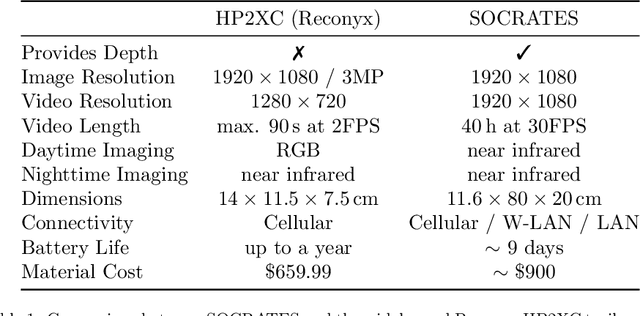
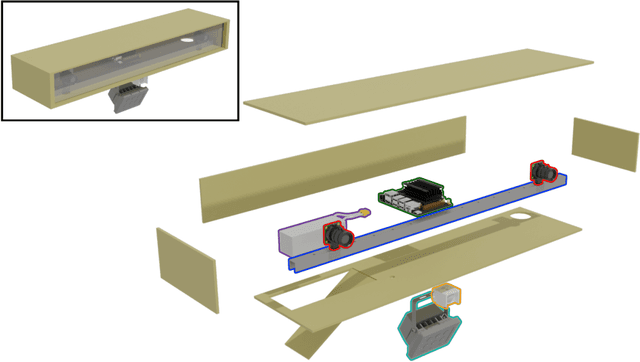

The development and application of modern technology is an essential basis for the efficient monitoring of species in natural habitats and landscapes to trace the development of ecosystems, species communities, and populations, and to analyze reasons of changes. For estimating animal abundance using methods such as camera trap distance sampling, spatial information of natural habitats in terms of 3D (three-dimensional) measurements is crucial. Additionally, 3D information improves the accuracy of animal detection using camera trapping. This study presents a novel approach to 3D camera trapping featuring highly optimized hardware and software. This approach employs stereo vision to infer 3D information of natural habitats and is designated as StereO CameRA Trap for monitoring of biodivErSity (SOCRATES). A comprehensive evaluation of SOCRATES shows not only a $3.23\%$ improvement in animal detection (bounding box $\text{mAP}_{75}$) but also its superior applicability for estimating animal abundance using camera trap distance sampling. The software and documentation of SOCRATES is provided at https://github.com/timmh/socrates