 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOCKS: A Stochastic Optimal Control and Reachability Toolbox Using Kernel Methods
Paper and Code
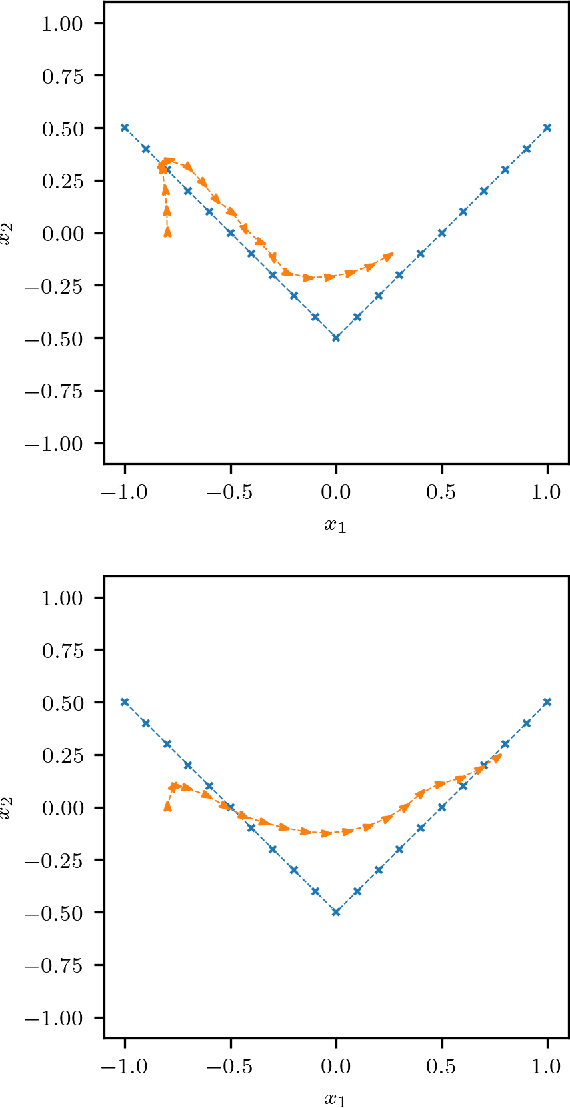
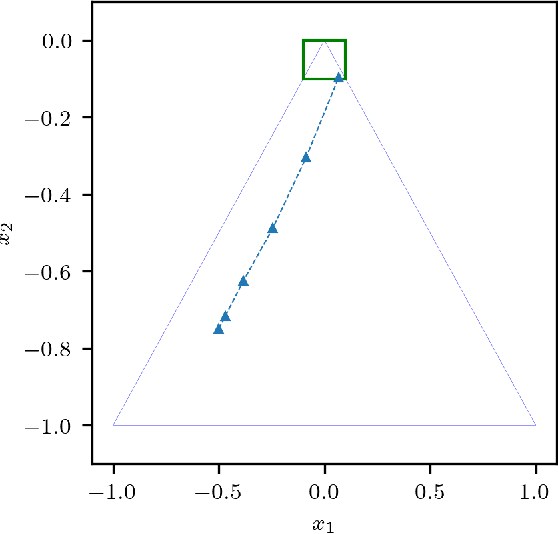

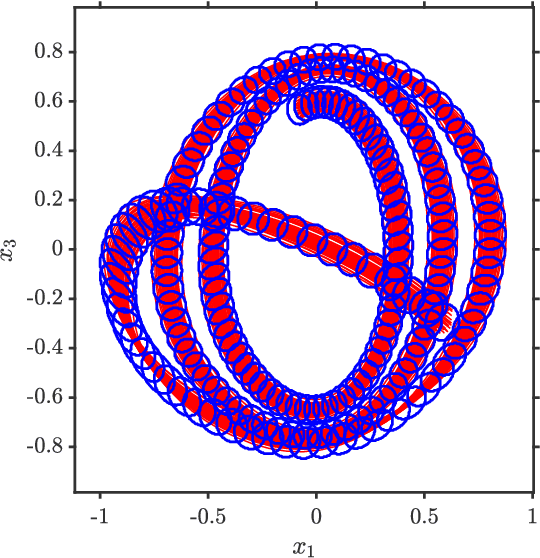
We present SOCKS, a data-driven stochastic optimal control toolbox based in kernel methods. SOCKS is a collection of data-driven algorithms that compute approximate solutions to stochastic optimal control problems with arbitrary cost and constraint functions, including stochastic reachability, which seeks to determine the likelihood that a system will reach a desired target set while respecting a set of pre-defined safety constraints. Our approach relies upon a class of machine learning algorithms based in kernel methods, a nonparametric technique which can be used to represent probability distributions in a high-dimensional space of functions known as a reproducing kernel Hilbert space. As a nonparametric technique, kernel methods are inherently data-driven, meaning that they do not place prior assumptions on the system dynamics or the structure of the uncertainty. This makes the toolbox amenable to a wide variety of systems, including those with nonlinear dynamics, black-box elements, and poorly characterized stochastic disturbances. We present the main features of SOCKS and demonstrate its capabilities on several benchmarks.