 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocial Force Embedded Mixed Graph Convolutional Network for Multi-class Trajectory Prediction
Paper and Code
Apr 20, 2024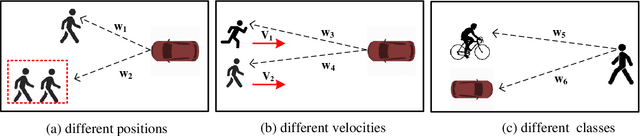
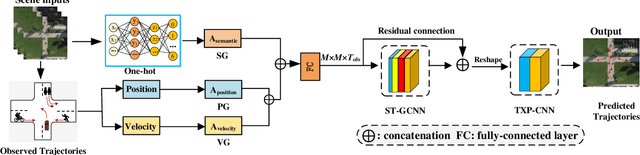
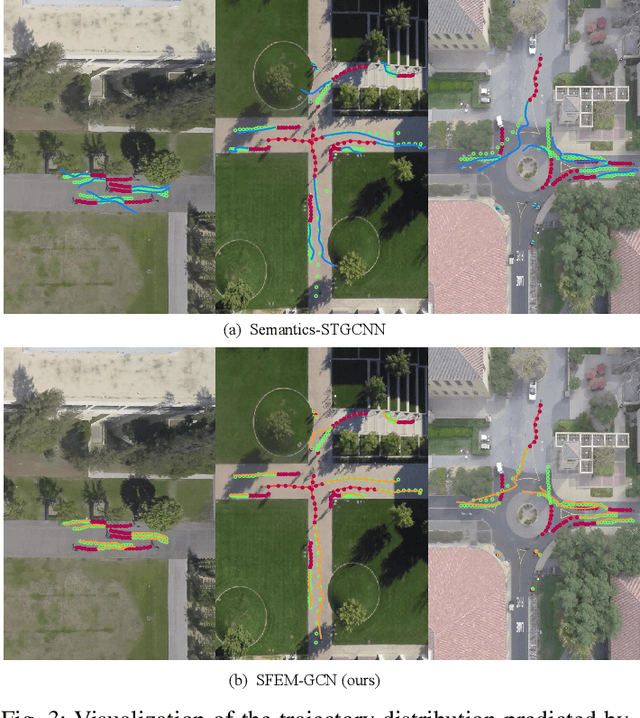

Accurate prediction of agent motion trajectories is crucial for autonomous driving, contributing to the reduction of collision risks in human-vehicle interactions and ensuring ample response time for other traffic participants. Current research predominantly focuses on traditional deep learning methods, including convolutional neural networks (CNNs) and recurrent neural networks (RNNs). These methods leverage relative distances to forecast the motion trajectories of a single class of agents. However, in complex traffic scenarios, the motion patterns of various types of traffic participants exhibit inherent randomness and uncertainty. Relying solely on relative distances may not adequately capture the nuanced interaction patterns between different classes of road users. In this paper, we propose a novel multi-class trajectory prediction method named the social force embedded mixed graph convolutional network (SFEM-GCN). SFEM-GCN comprises three graph topologies: the semantic graph (SG), position graph (PG), and velocity graph (VG). These graphs encode various of social force relationships among different classes of agents in complex scenes. Specifically, SG utilizes one-hot encoding of agent-class information to guide the construction of graph adjacency matrices based on semantic information. PG and VG create adjacency matrices to capture motion interaction relationships between different classes agents. These graph structures are then integrated into a mixed graph, where learning is conducted using a spatiotemporal graph convolutional neural network (ST-GCNN). To further enhance prediction performance, we adopt temporal convolutional networks (TCNs) to generate the predicted trajectory with fewer parameters. Experimental results on publicly available datasets demonstrate that SFEM-GCN surpasses state-of-the-art methods in terms of accuracy and robustness.