Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoap-bubble Optimization of Gaits
Paper and Code
Oct 26, 2016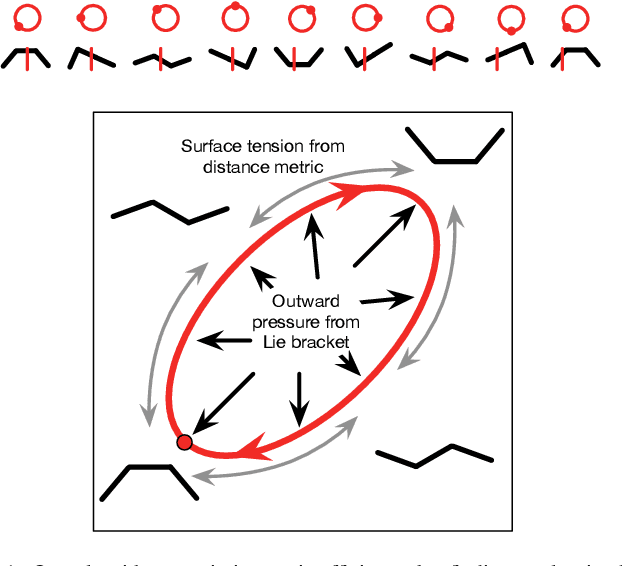
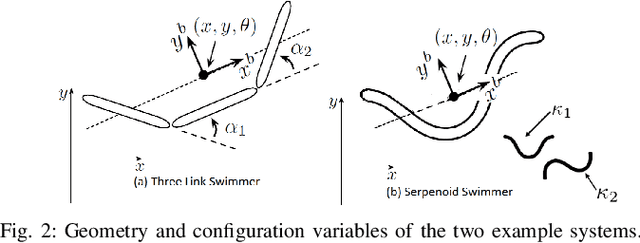
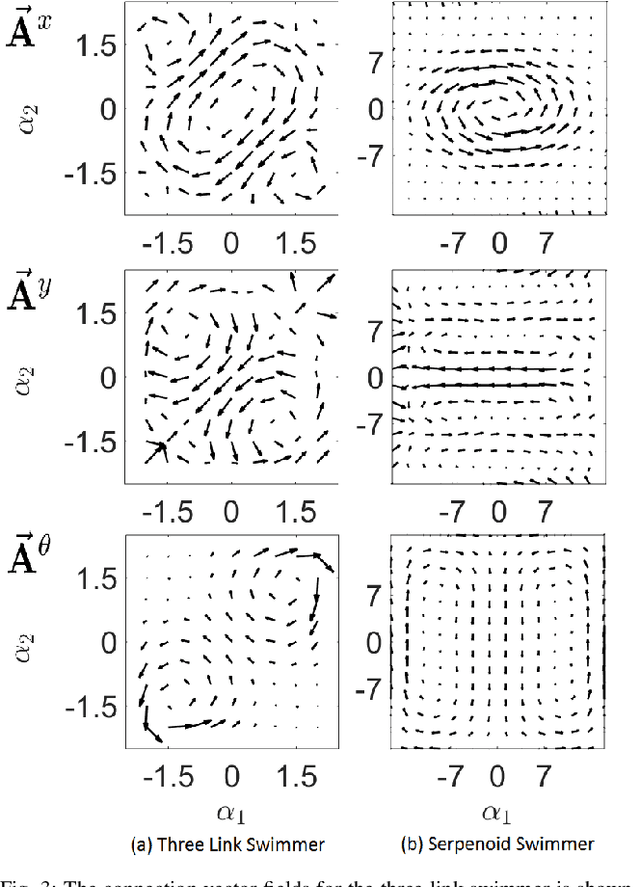
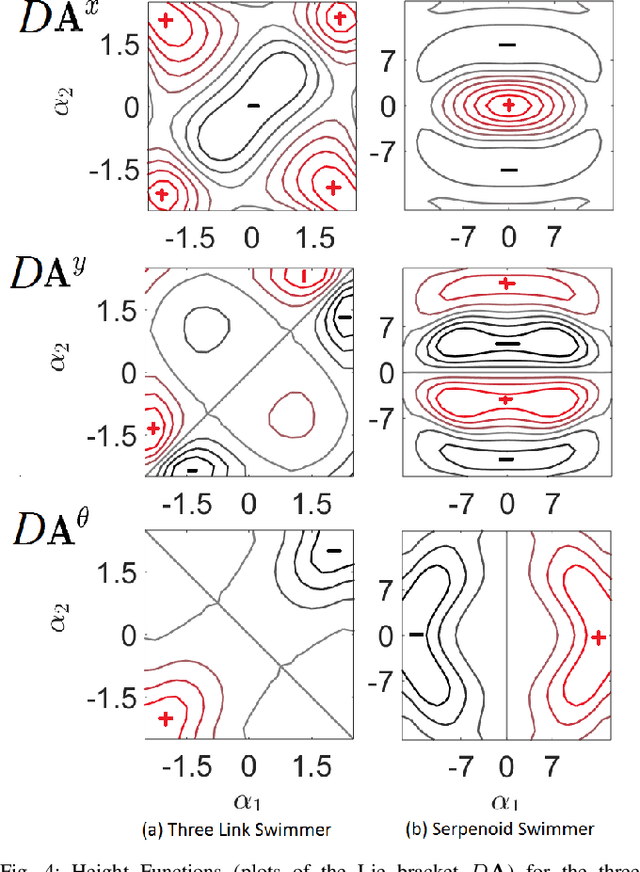
In this paper, we present a geometric variational algorithm for optimizing the gaits of kinematic locomoting systems. The dynamics of this algorithm are analogous to the physics of a soap bubble, with the system's Lie bracket supplying an "inflation pressure" that is balanced by a "surface tension" term derived from a Riemannian metric on the system's shape space. We demonstrate this optimizer on a variety of system geometries (including Purcell's swimmer) and for optimization criteria that include maximizing displacement and efficiency of motion for both translation and turning motions.
* Accepted for the Proceedings of the 55th IEEE Conference on Decision
and Control, December 2016
View paper on