Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmoothed functional-based gradient algorithms for off-policy reinforcement learning
Paper and Code
Jan 06, 2021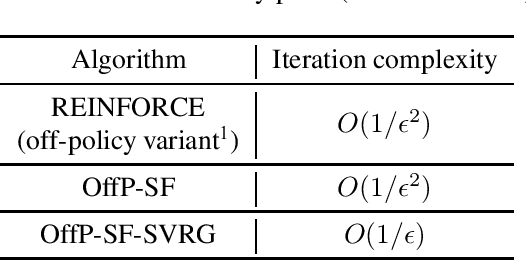

We consider the problem of control in an off-policy reinforcement learning (RL) context. We propose a policy gradient scheme that incorporates a smoothed functional-based gradient estimation scheme. We provide an asymptotic convergence guarantee for the proposed algorithm using the ordinary differential equation (ODE) approach. Further, we derive a non-asymptotic bound that quantifies the rate of convergence of the proposed algorithm.
View paper on