 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLAIM: Robust Dense Neural SLAM for Online Tracking and Mapping
Paper and Code
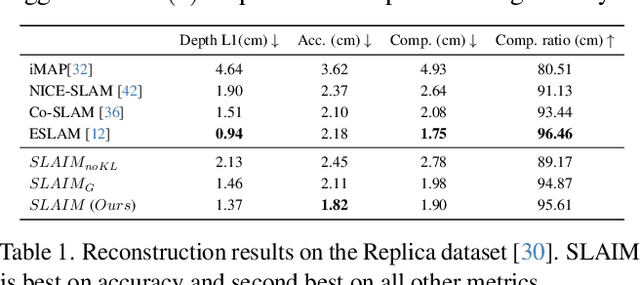
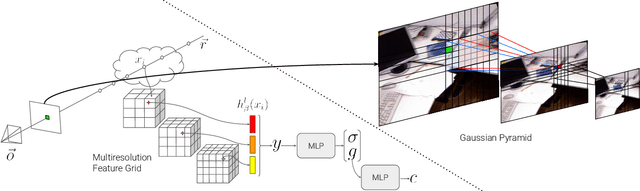
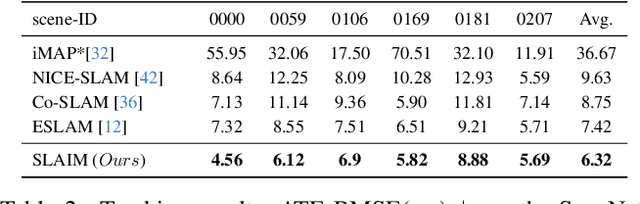
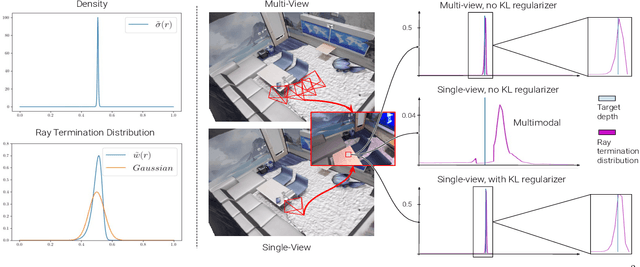
We present SLAIM - Simultaneous Localization and Implicit Mapping. We propose a novel coarse-to-fine tracking model tailored for Neural Radiance Field SLAM (NeRF-SLAM) to achieve state-of-the-art tracking performance. Notably, existing NeRF-SLAM systems consistently exhibit inferior tracking performance compared to traditional SLAM algorithms. NeRF-SLAM methods solve camera tracking via image alignment and photometric bundle-adjustment. Such optimization processes are difficult to optimize due to the narrow basin of attraction of the optimization loss in image space (local minima) and the lack of initial correspondences. We mitigate these limitations by implementing a Gaussian pyramid filter on top of NeRF, facilitating a coarse-to-fine tracking optimization strategy. Furthermore, NeRF systems encounter challenges in converging to the right geometry with limited input views. While prior approaches use a Signed-Distance Function (SDF)-based NeRF and directly supervise SDF values by approximating ground truth SDF through depth measurements, this often results in suboptimal geometry. In contrast, our method employs a volume density representation and introduces a novel KL regularizer on the ray termination distribution, constraining scene geometry to consist of empty space and opaque surfaces. Our solution implements both local and global bundle-adjustment to produce a robust (coarse-to-fine) and accurate (KL regularizer) SLAM solution. We conduct experiments on multiple datasets (ScanNet, TUM, Replica) showing state-of-the-art results in tracking and in reconstruction accuracy.