Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingularity Analysis of Limited-dof Parallel Manipulators using Grassmann-Cayley Algebra
Paper and Code
Sep 18, 2008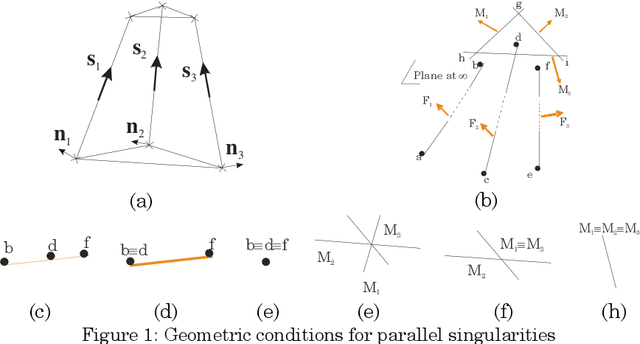
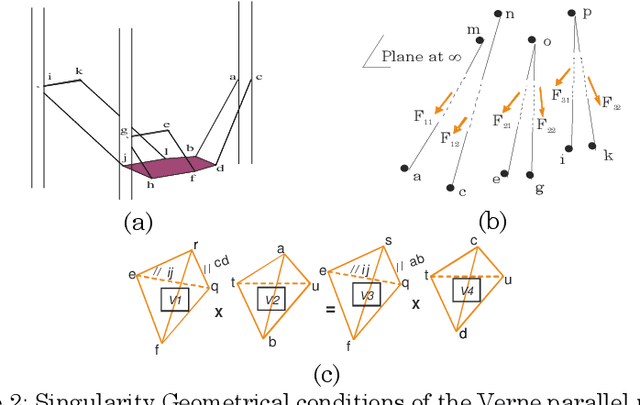
This paper characterizes geometrically the singularities of limited DOF parallel manipulators. The geometric conditions associated with the dependency of six Pl\"ucker vector of lines (finite and infinite) constituting the rows of the inverse Jacobian matrix are formulated using Grassmann-Cayley algebra. Manipulators under consideration do not need to have a passive spherical joint somewhere in each leg. This study is illustrated with three example robots
* 11th International Symposium on Advances in Robot Kinematics,
France (2008)
View paper on