 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle-Timescale Actor-Critic Provably Finds Globally Optimal Policy
Paper and Code
Aug 02, 2020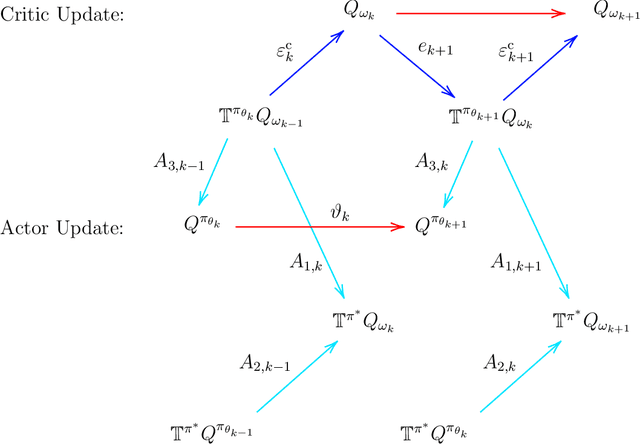
We study the global convergence and global optimality of actor-critic, one of the most popular families of reinforcement learning algorithms. While most existing works on actor-critic employ bi-level or two-timescale updates, we focus on the more practical single-timescale setting, where the actor and critic are updated simultaneously. Specifically, in each iteration, the critic update is obtained by applying the Bellman evaluation operator only once while the actor is updated in the policy gradient direction computed using the critic. Moreover, we consider two function approximation settings where both the actor and critic are represented by linear or deep neural networks. For both cases, we prove that the actor sequence converges to a globally optimal policy at a sublinear $O(K^{-1/2})$ rate, where $K$ is the number of iterations. To the best of our knowledge, we establish the rate of convergence and global optimality of single-timescale actor-critic with linear function approximation for the first time. Moreover, under the broader scope of policy optimization with nonlinear function approximation, we prove that actor-critic with deep neural network finds the globally optimal policy at a sublinear rate for the first time.