 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle Shot 6D Object Pose Estimation
Paper and Code
Apr 27, 2020
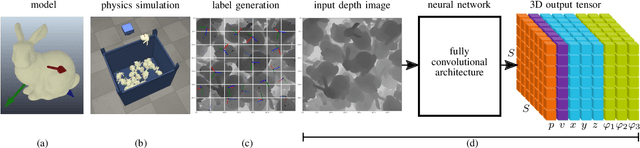
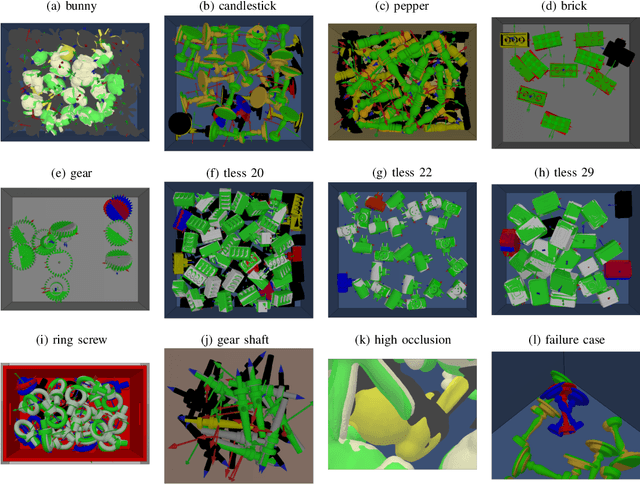
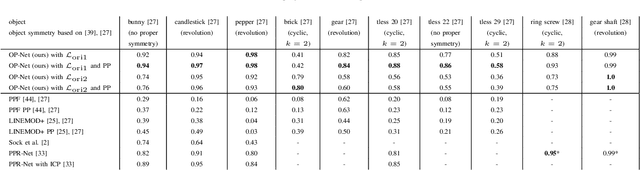
In this paper, we introduce a novel single shot approach for 6D object pose estimation of rigid objects based on depth images. For this purpose, a fully convolutional neural network is employed, where the 3D input data is spatially discretized and pose estimation is considered as a regression task that is solved locally on the resulting volume elements. With 65 fps on a GPU, our Object Pose Network (OP-Net) is extremely fast, is optimized end-to-end, and estimates the 6D pose of multiple objects in the image simultaneously. Our approach does not require manually 6D pose-annotated real-world datasets and transfers to the real world, although being entirely trained on synthetic data. The proposed method is evaluated on public benchmark datasets, where we can demonstrate that state-of-the-art methods are significantly outperformed.