 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSIM2REALVIZ: Visualizing the Sim2Real Gap in Robot Ego-Pose Estimation
Paper and Code
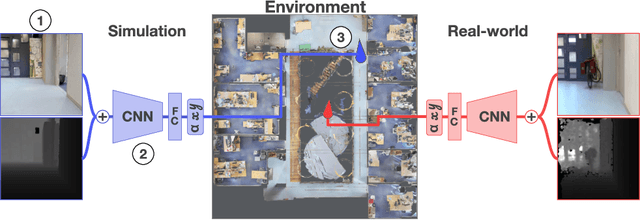
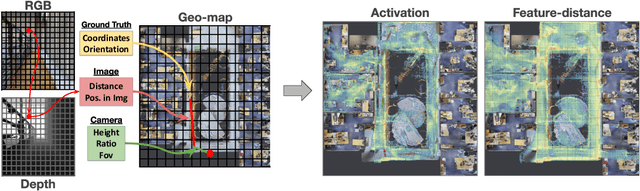
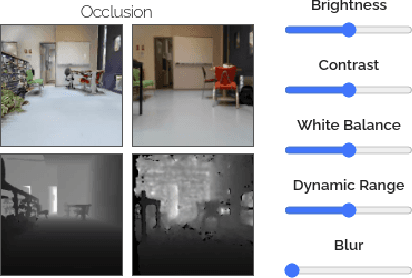

The Robotics community has started to heavily rely on increasingly realistic 3D simulators for large-scale training of robots on massive amounts of data. But once robots are deployed in the real world, the simulation gap, as well as changes in the real world (e.g. lights, objects displacements) lead to errors. In this paper, we introduce Sim2RealViz, a visual analytics tool to assist experts in understanding and reducing this gap for robot ego-pose estimation tasks, i.e. the estimation of a robot's position using trained models. Sim2RealViz displays details of a given model and the performance of its instances in both simulation and real-world. Experts can identify environment differences that impact model predictions at a given location and explore through direct interactions with the model hypothesis to fix it. We detail the design of the tool, and case studies related to the exploit of the regression to the mean bias and how it can be addressed, and how models are perturbed by the vanish of landmarks such as bikes.