 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShared perception is different from individual perception: a new look on context dependency
Paper and Code
Jul 14, 2022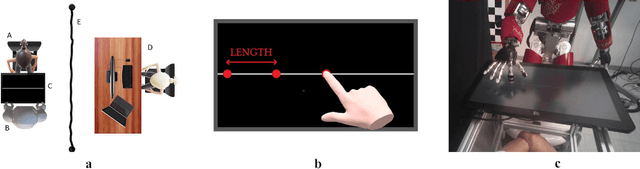
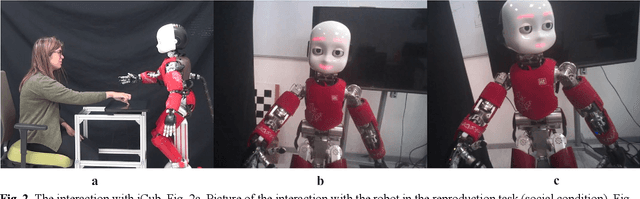
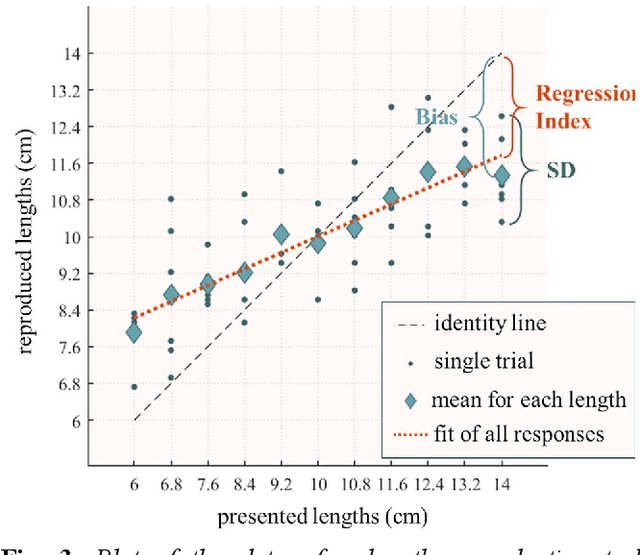
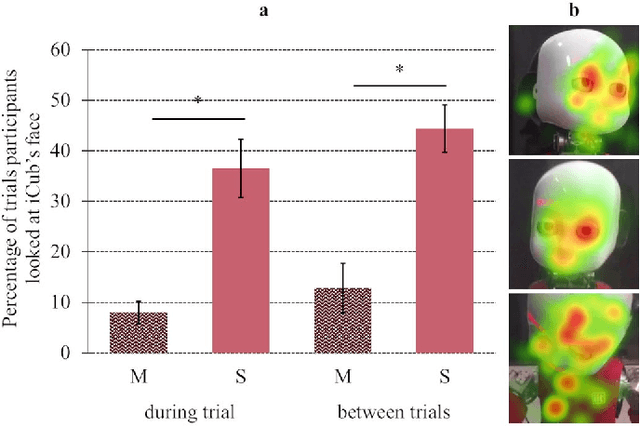
Human perception is based on unconscious inference, where sensory input integrates with prior information. This phenomenon, known as context dependency, helps in facing the uncertainty of the external world with predictions built upon previous experience. On the other hand, human perceptual processes are inherently shaped by social interactions. However, how the mechanisms of context dependency are affected is to date unknown. If using previous experience - priors - is beneficial in individual settings, it could represent a problem in social scenarios where other agents might not have the same priors, causing a perceptual misalignment on the shared environment. The present study addresses this question. We studied context dependency in an interactive setting with a humanoid robot iCub that acted as a stimuli demonstrator. Participants reproduced the lengths shown by the robot in two conditions: one with iCub behaving socially and another with iCub acting as a mechanical arm. The different behavior of the robot significantly affected the use of prior in perception. Moreover, the social robot positively impacted perceptual performances by enhancing accuracy and reducing participants overall perceptual errors. Finally, the observed phenomenon has been modelled following a Bayesian approach to deepen and explore a new concept of shared perception.