Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShaped Policy Search for Evolutionary Strategies using Waypoints
Paper and Code
May 30, 2021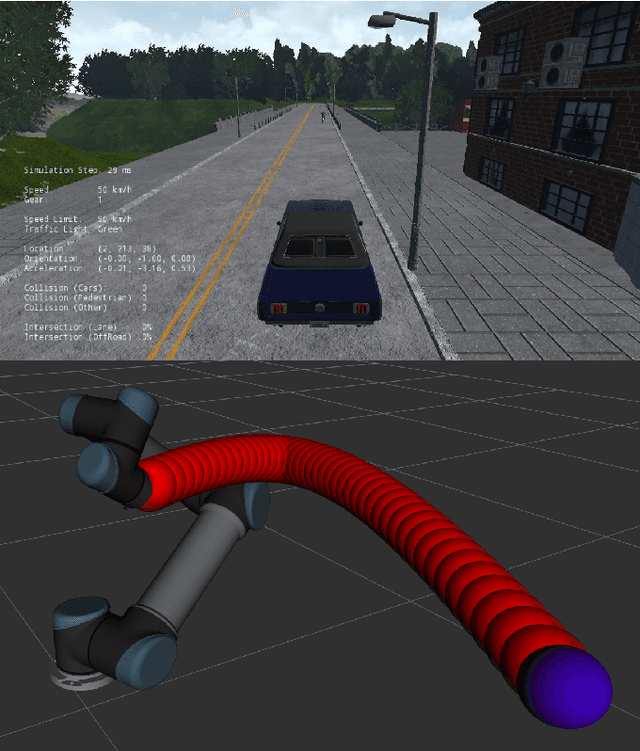


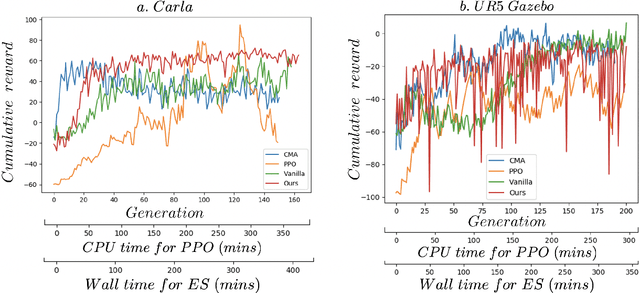
In this paper, we try to improve exploration in Blackbox methods, particularly Evolution strategies (ES), when applied to Reinforcement Learning (RL) problems where intermediate waypoints/subgoals are available. Since Evolutionary strategies are highly parallelizable, instead of extracting just a scalar cumulative reward, we use the state-action pairs from the trajectories obtained during rollouts/evaluations, to learn the dynamics of the agent. The learnt dynamics are then used in the optimization procedure to speed-up training. Lastly, we show how our proposed approach is universally applicable by presenting results from experiments conducted on Carla driving and UR5 robotic arm simulators.
* Presented at the International Conference on Robotics and Automation
(ICRA) 2021
View paper on