Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape Registration with Directional Data
Paper and Code
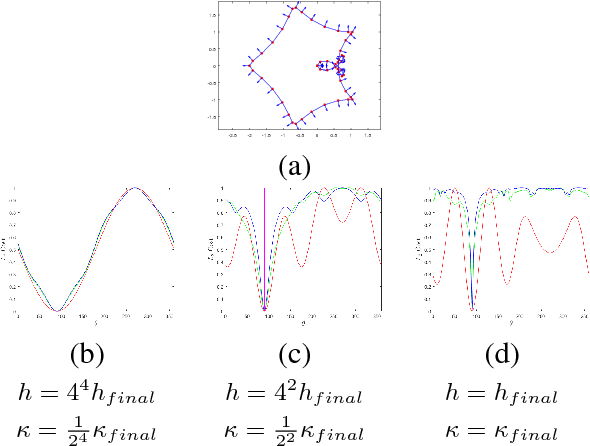
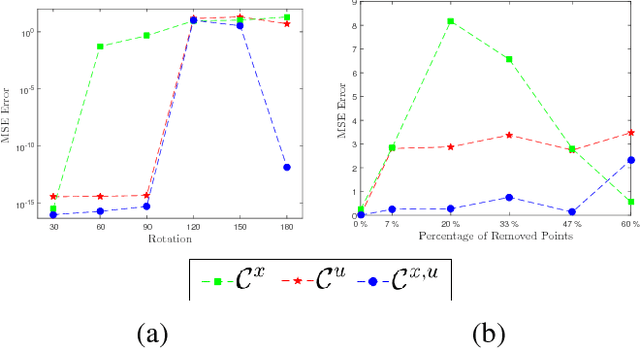
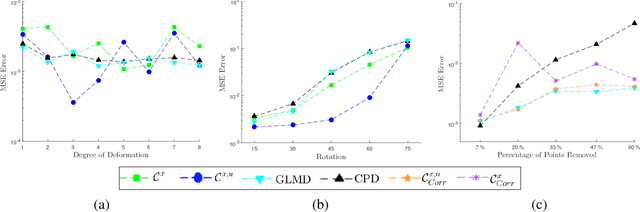
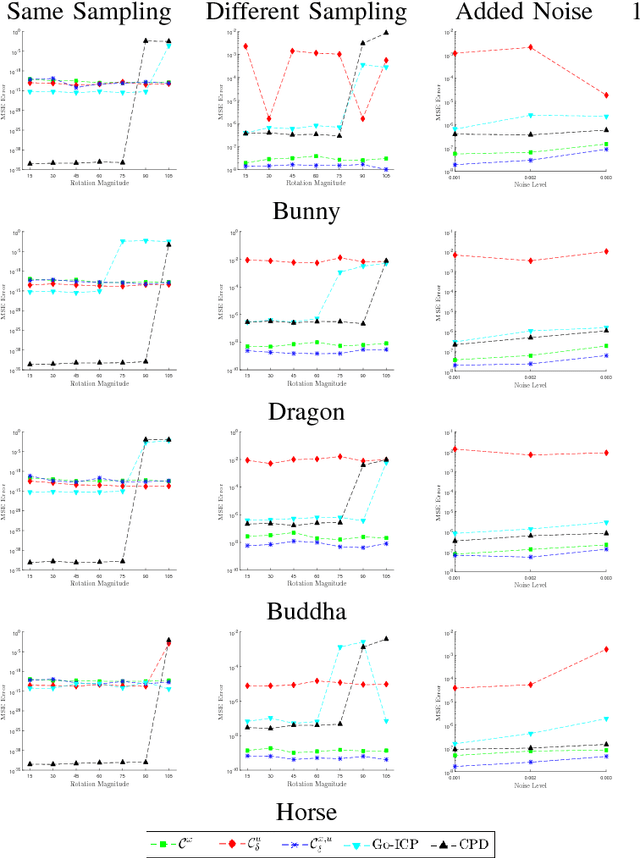
We propose several cost functions for registration of shapes encoded with Euclidean and/or non-Euclidean information (unit vectors). Our framework is assessed for estimation of both rigid and non-rigid transformations between the target and model shapes corresponding to 2D contours and 3D surfaces. The experimental results obtained confirm that using the combination of a point's position and unit normal vector in a cost function can enhance the registration results compared to state of the art methods.
* Pattern Recognition 79 (2018) 452-466 * v2: Updated v1 by adding supplementary material
View paper on