 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape Back-Projection In 3D Scenes
Paper and Code
Jan 16, 2021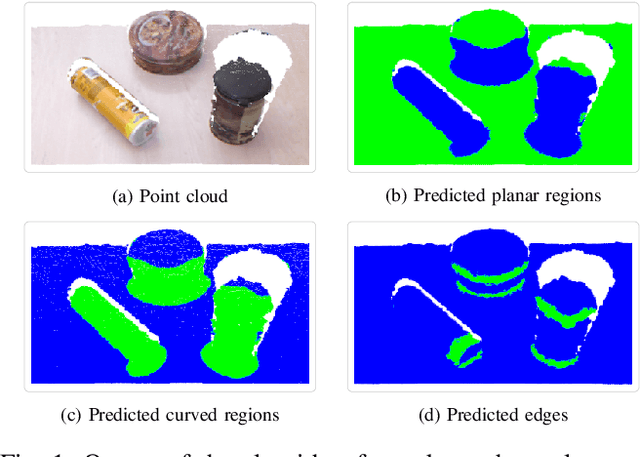
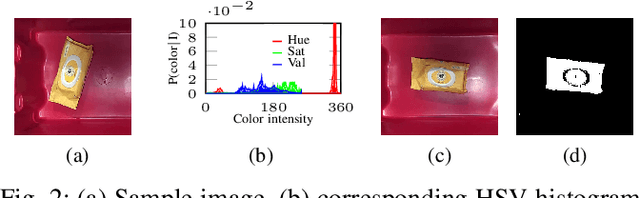
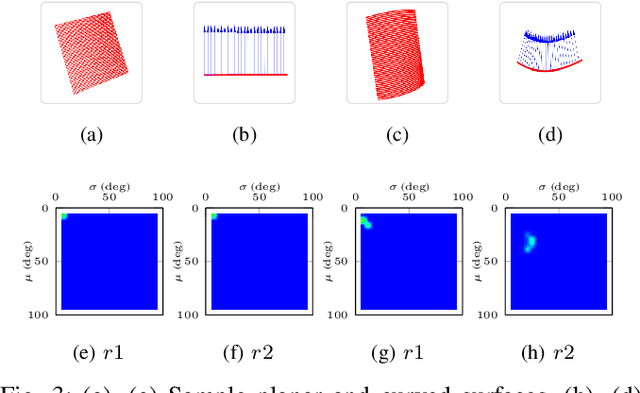

In this work, we propose a novel framework shape back-projection for computationally efficient point cloud processing in a probabilistic manner. The primary component of the technique is shape histogram and a back-projection procedure. The technique measures similarity between 3D surfaces, by analyzing their geometrical properties. It is analogous to color back-projection which measures similarity between images, simply by looking at their color distributions. In the overall process, first, shape histogram of a sample surface (e.g. planar) is computed, which captures the profile of surface normals around a point in form of a probability distribution. Later, the histogram is back-projected onto a test surface and a likelihood score is obtained. The score depicts that how likely a point in the test surface behaves similar to the sample surface, geometrically. Shape back-projection finds its application in binary surface classification, high curvature edge detection in unorganized point cloud, automated point cloud labeling for 3D-CNNs (convolutional neural network) etc. The algorithm can also be used for real-time robotic operations such as autonomous object picking in warehouse automation, ground plane extraction for autonomous vehicles and can be deployed easily on computationally limited platforms (UAVs).