 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSGTBN: Generating Dense Depth Maps from Single-Line LiDAR
Paper and Code
Jun 24, 2021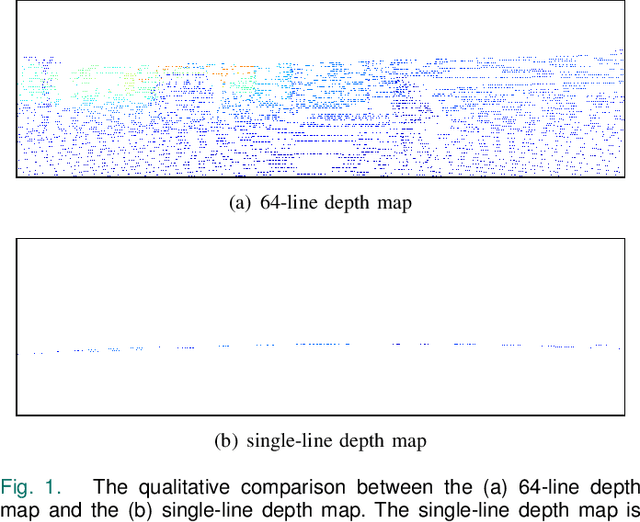
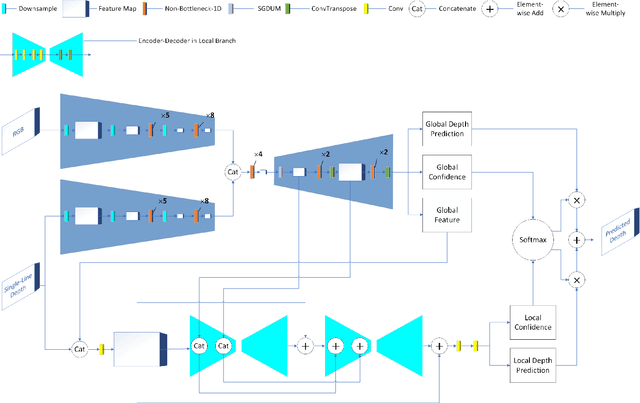
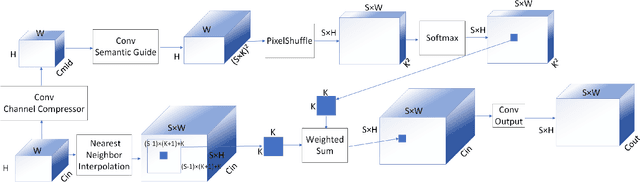
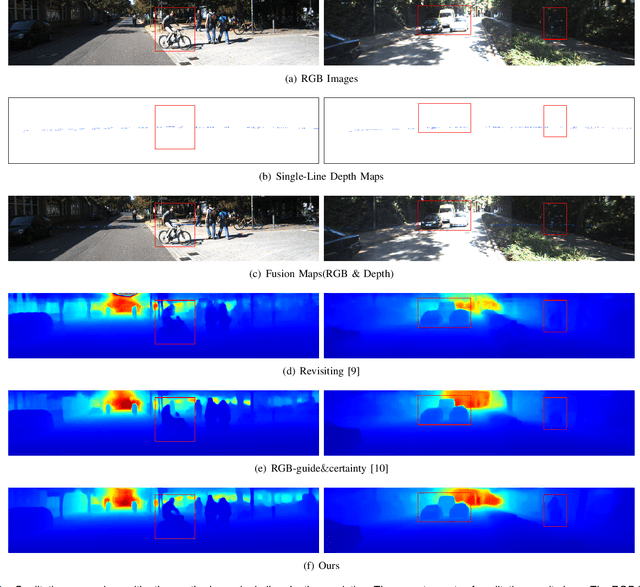
Depth completion aims to generate a dense depth map from the sparse depth map and aligned RGB image. However, current depth completion methods use extremely expensive 64-line LiDAR(about $100,000) to obtain sparse depth maps, which will limit their application scenarios. Compared with the 64-line LiDAR, the single-line LiDAR is much less expensive and much more robust. Therefore, we propose a method to tackle the problem of single-line depth completion, in which we aim to generate a dense depth map from the single-line LiDAR info and the aligned RGB image. A single-line depth completion dataset is proposed based on the existing 64-line depth completion dataset(KITTI). A network called Semantic Guided Two-Branch Network(SGTBN) which contains global and local branches to extract and fuse global and local info is proposed for this task. A Semantic guided depth upsampling module is used in our network to make full use of the semantic info in RGB images. Except for the usual MSE loss, we add the virtual normal loss to increase the constraint of high-order 3D geometry in our network. Our network outperforms the state-of-the-art in the single-line depth completion task. Besides, compared with the monocular depth estimation, our method also has significant advantages in precision and model size.