 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeparating value functions across time-scales
Paper and Code
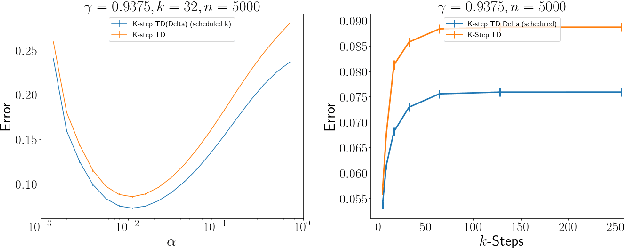

In many finite horizon episodic reinforcement learning (RL) settings, it is desirable to optimize for the undiscounted return - in settings like Atari, for instance, the goal is to collect the most points while staying alive in the long run. Yet, it may be difficult (or even intractable) mathematically to learn with this target. As such, temporal discounting is often applied to optimize over a shorter effective planning horizon. This comes at the cost of potentially biasing the optimization target away from the undiscounted goal. In settings where this bias is unacceptable - where the system must optimize for longer horizons at higher discounts - the target of the value function approximator may increase in variance leading to difficulties in learning. We present an extension of temporal difference (TD) learning, which we call TD($\Delta$), that breaks down a value function into a series of components based on the differences between value functions with smaller discount factors. The separation of a longer horizon value function into these components has useful properties in scalability and performance. We discuss these properties and show theoretic and empirical improvements over standard TD learning in certain settings.