 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensing Volume Coverage of Robot Workspace using On-Robot Time-of-Flight Sensor Arrays for Safe Human Robot Interaction
Paper and Code
Jul 03, 2019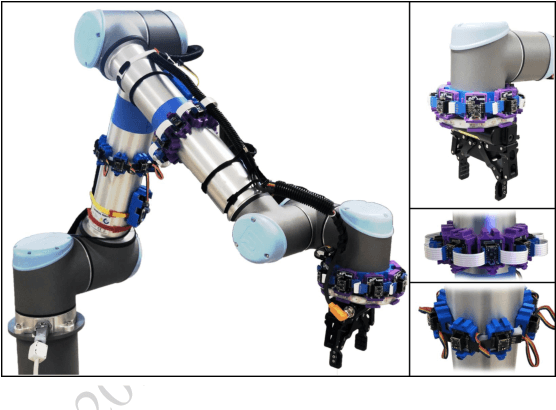
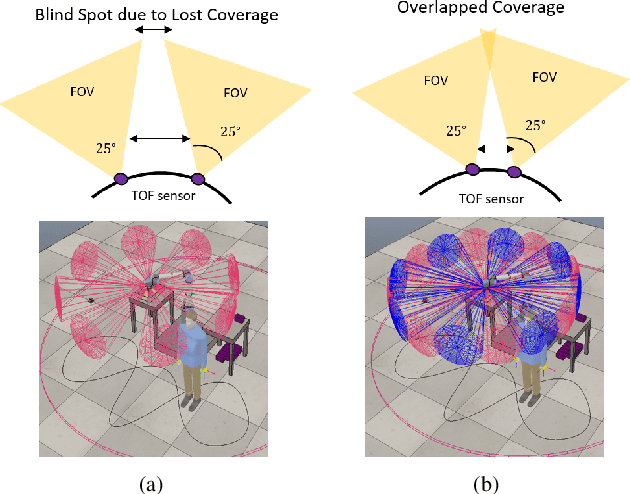
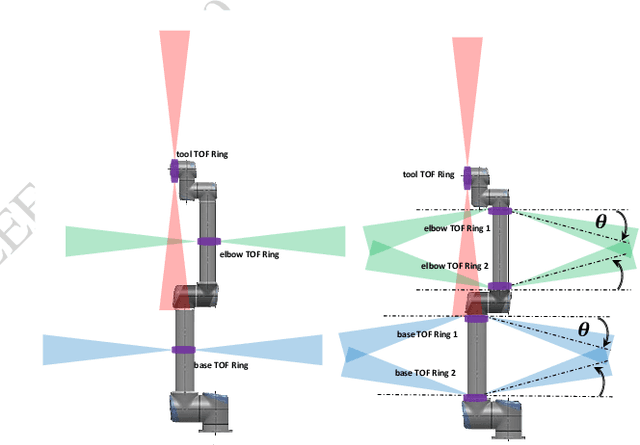
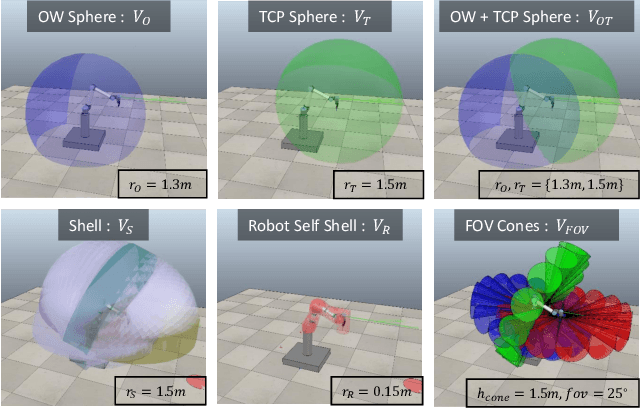
In this paper, an analysis of the sensing volume coverage of robot workspace as well as the shared human-robot collaborative workspace for various configurations of on-robot Time-of-Flight (ToF) sensor array rings is presented. A methodology for volumetry using octrees to quantify the detection/sensing volume of the sensors is proposed. The change in sensing volume coverage by increasing the number of sensors per ToF sensor array ring and also increasing the number of rings mounted on robot link is also studied. Considerations of maximum ideal volume around the robot workspace that a given ToF sensor array ring placement and orientation setup should cover for safe human robot interaction are presented. The sensing volume coverage measurements in this maximum ideal volume are tabulated and observations on various ToF configurations and their coverage for close and far zones of the robot are determined.