 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSEMI: Self-supervised Exploration via Multisensory Incongruity
Paper and Code
Sep 26, 2020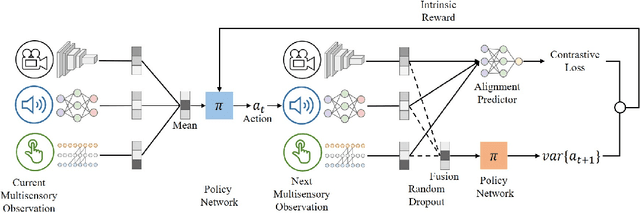
Efficient exploration is a long-standing problem in reinforcement learning. In this work, we introduce a self-supervised exploration policy by incentivizing the agent to maximize multisensory incongruity, which can be measured in two aspects: perception incongruity and action incongruity. The former represents the uncertainty in multisensory fusion model, while the latter represents the uncertainty in an agent's policy. Specifically, an alignment predictor is trained to detect whether multiple sensory inputs are aligned, the error of which is used to measure perception incongruity. The policy takes the multisensory observations with sensory-wise dropout as input and outputs actions for exploration. The variance of actions is further used to measure action incongruity. Our formulation allows the agent to learn skills by exploring in a self-supervised manner without any external rewards. Besides, our method enables the agent to learn a compact multimodal representation from hard examples, which further improves the sample efficiency of our policy learning. We demonstrate the efficacy of this formulation across a variety of benchmark environments including object manipulation and audio-visual games.