 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Belief Behavior Graph: Enabling Autonomous Robot Inspection in Unknown Environments
Paper and Code
Jan 30, 2024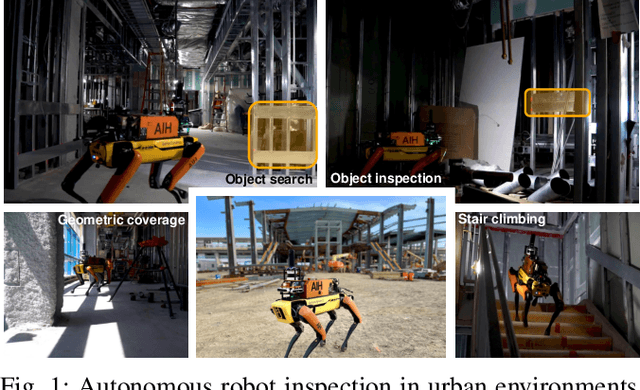
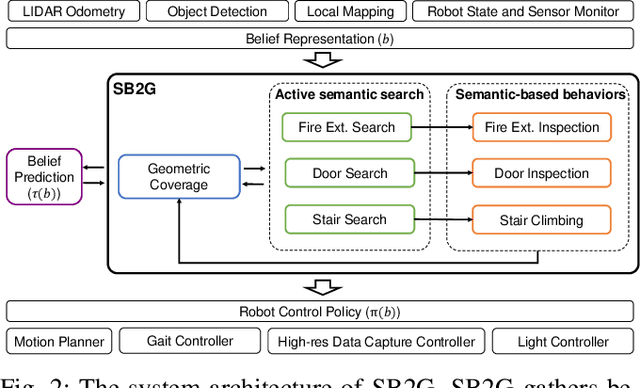
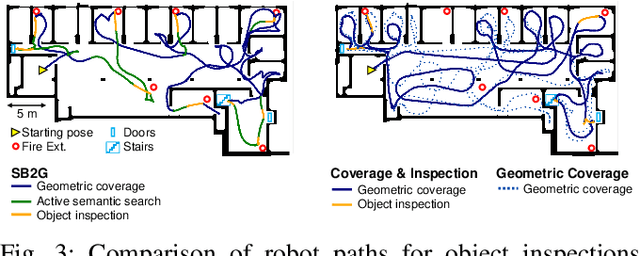
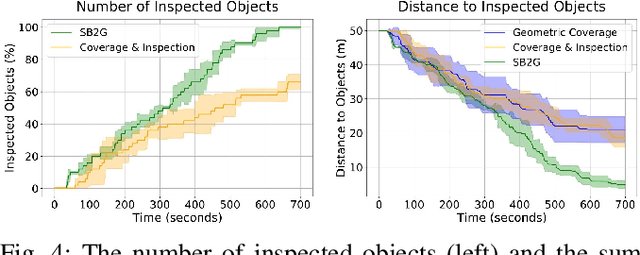
This paper addresses the problem of autonomous robotic inspection in complex and unknown environments. This capability is crucial for efficient and precise inspections in various real-world scenarios, even when faced with perceptual uncertainty and lack of prior knowledge of the environment. Existing methods for real-world autonomous inspections typically rely on predefined targets and waypoints and often fail to adapt to dynamic or unknown settings. In this work, we introduce the Semantic Belief Behavior Graph (SB2G) framework as a novel approach to semantic-aware autonomous robot inspection. SB2G generates a control policy for the robot, featuring behavior nodes that encapsulate various semantic-based policies designed for inspecting different classes of objects. We design an active semantic search behavior to guide the robot in locating objects for inspection while reducing semantic information uncertainty. The edges in the SB2G encode transitions between these behaviors. We validate our approach through simulation and real-world urban inspections using a legged robotic platform. Our results show that SB2G enables a more efficient inspection policy, exhibiting performance comparable to human-operated inspections.