 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Learning of Event-Based Optical Flow with Spiking Neural Networks
Paper and Code
Jun 03, 2021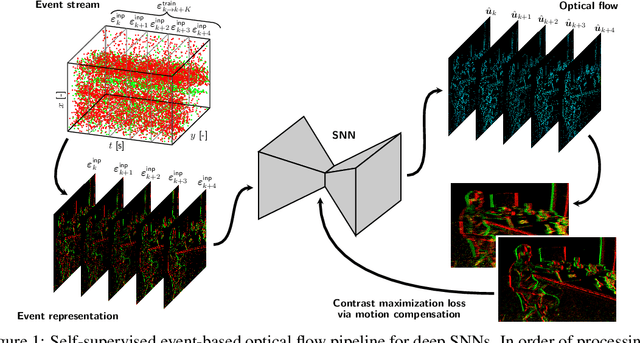
Neuromorphic sensing and computing hold a promise for highly energy-efficient and high-bandwidth-sensor processing. A major challenge for neuromorphic computing is that learning algorithms for traditional artificial neural networks (ANNs) do not transfer directly to spiking neural networks (SNNs) due to the discrete spikes and more complex neuronal dynamics. As a consequence, SNNs have not yet been successfully applied to complex, large-scale tasks. In this article, we focus on the self-supervised learning problem of optical flow estimation from event-based camera inputs, and investigate the changes that are necessary to the state-of-the-art ANN training pipeline in order to successfully tackle it with SNNs. More specifically, we first modify the input event representation to encode a much smaller time slice with minimal explicit temporal information. Consequently, we make the network's neuronal dynamics and recurrent connections responsible for integrating information over time. Moreover, we reformulate the self-supervised loss function for event-based optical flow to improve its convexity. We perform experiments with various types of recurrent ANNs and SNNs using the proposed pipeline. Concerning SNNs, we investigate the effects of elements such as parameter initialization and optimization, surrogate gradient shape, and adaptive neuronal mechanisms. We find that initialization and surrogate gradient width play a crucial part in enabling learning with sparse inputs, while the inclusion of adaptivity and learnable neuronal parameters can improve performance. We show that the performance of the proposed ANNs and SNNs are on par with that of the current state-of-the-art ANNs trained in a self-supervised manner.