 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-supervised classification of dynamic obstacles using the temporal information provided by videos
Paper and Code
Oct 21, 2019
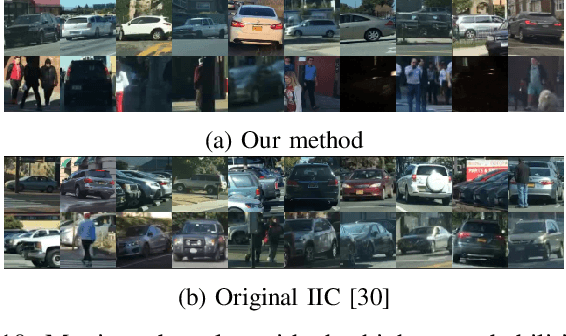
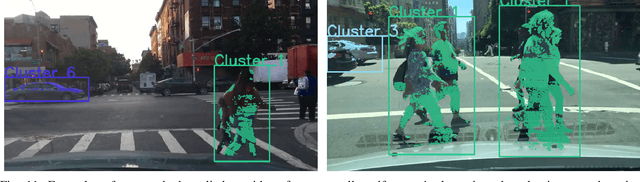
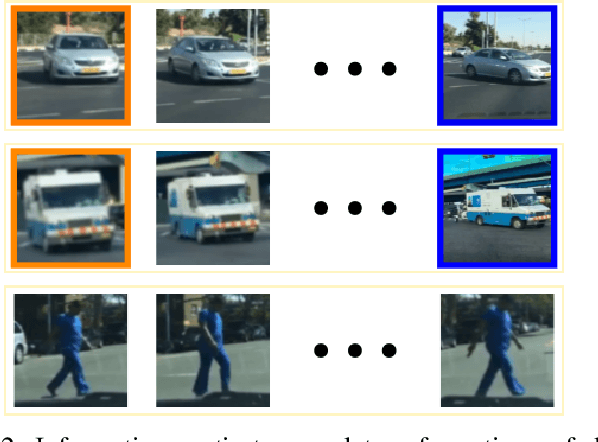
Nowadays, autonomous driving systems can detect, segment, and classify the surrounding obstacles using a monocular camera. However, state-of-the-art methods solving these tasks generally perform a fully supervised learning process and require a large amount of training labeled data. On another note, some self-supervised learning approaches can deal with detection and segmentation of dynamic obstacles using the temporal information available in video sequences. In this work, we propose in addition to classifiy the detected obstacles depending on their motion pattern. We present a novel self-supervised framework consisting of learning offline clusters from temporal patch sequences and using these clusters as pseudo labels to train a real-time image classifier. The presented model outperforms state-of-the-art unsupervised image classification methods on BDD100K dataset.