 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-organized arrival system for urban air mobility
Paper and Code
Apr 04, 2024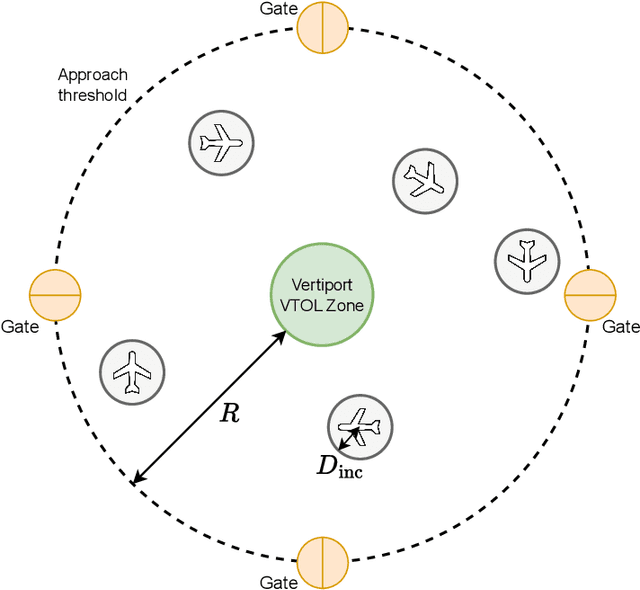

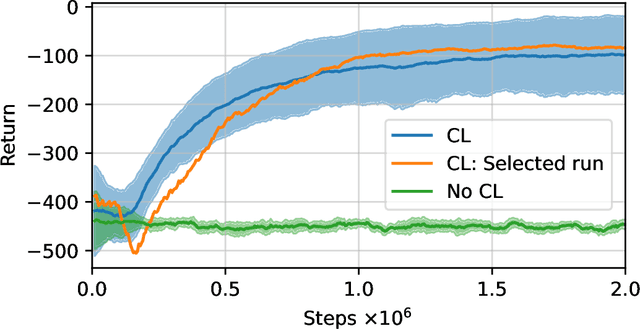
Urban air mobility is an innovative mode of transportation in which electric vertical takeoff and landing (eVTOL) vehicles operate between nodes called vertiports. We outline a self-organized vertiport arrival system based on deep reinforcement learning. The airspace around the vertiport is assumed to be circular, and the vehicles can freely operate inside. Each aircraft is considered an individual agent and follows a shared policy, resulting in decentralized actions that are based on local information. We investigate the development of the reinforcement learning policy during training and illustrate how the algorithm moves from suboptimal local holding patterns to a safe and efficient final policy. The latter is validated in simulation-based scenarios and also deployed on small-scale unmanned aerial vehicles to showcase its real-world usability.