 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Assessment and Correction of Sensor Synchronization
Paper and Code
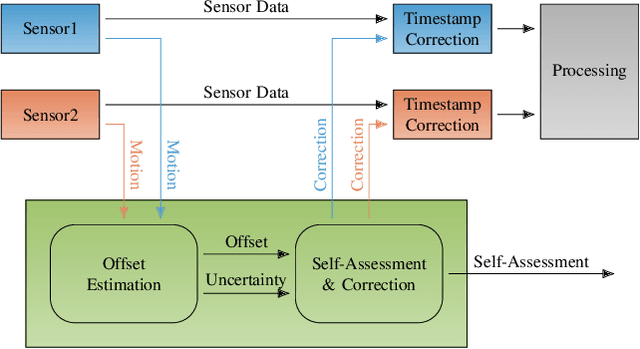
We propose an approach to assess the synchronization of rigidly mounted sensors based on their rotational motion. Using function similarity measures combined with a sliding window approach, our approach is capable of estimating time-varying time offsets. Further, the estimated offset allows the correction of erroneously assigned time stamps on measurements. This mitigates the effect of synchronization issues on subsequent modules in autonomous software stacks, such as tracking systems that heavily rely on accurate measurement time stamps. Additionally, a self-assessment based on an uncertainty measure is derived, and correction strategies are described. Our approach is evaluated with Monte Carlo experiments containing different error patterns. The results show that our approach accurately estimates time offsets and, thus, is able to detect and assess synchronization issues. To further embrace the importance of our approach for autonomous systems, we investigate the effect of synchronization inconsistencies in tracking systems in more detail and demonstrate the beneficial effect of our proposed offset correction.