 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSecure Deep Learning-based Distributed Intelligence on Pocket-sized Drones
Paper and Code
Jul 04, 2023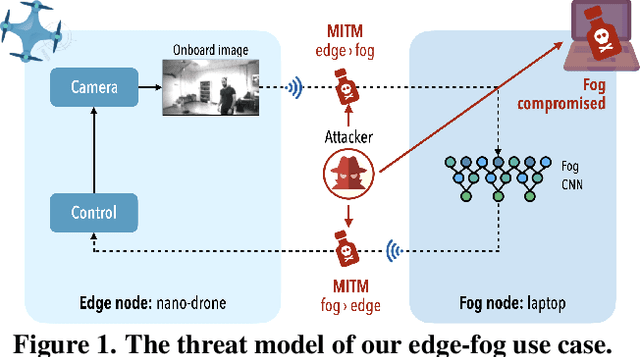
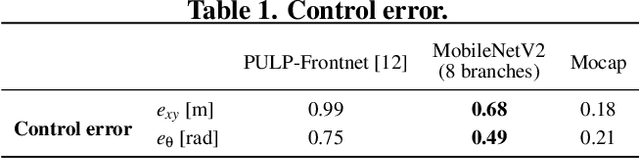
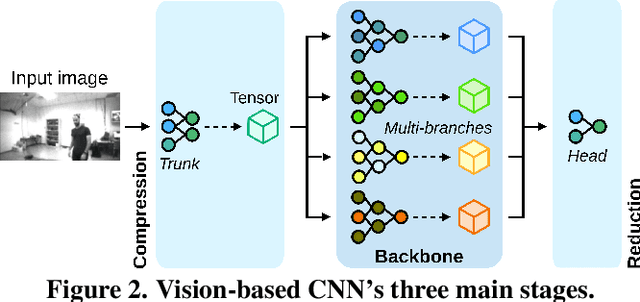
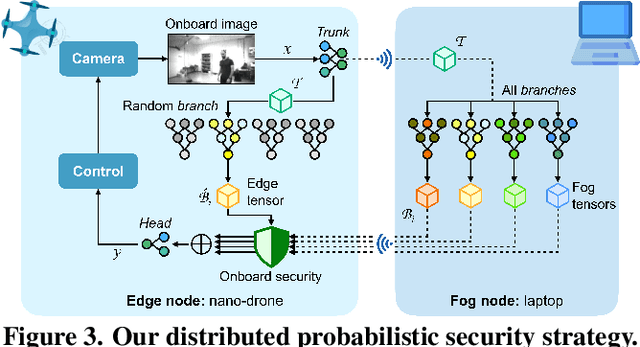
Palm-sized nano-drones are an appealing class of edge nodes, but their limited computational resources prevent running large deep-learning models onboard. Adopting an edge-fog computational paradigm, we can offload part of the computation to the fog; however, this poses security concerns if the fog node, or the communication link, can not be trusted. To tackle this concern, we propose a novel distributed edge-fog execution scheme that validates fog computation by redundantly executing a random subnetwork aboard our nano-drone. Compared to a State-of-the-Art visual pose estimation network that entirely runs onboard, a larger network executed in a distributed way improves the $R^2$ score by +0.19; in case of attack, our approach detects it within 2s with 95% probability.