 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSearching from Area to Point: A Hierarchical Framework for Semantic-Geometric Combined Feature Matching
Paper and Code
May 05, 2023

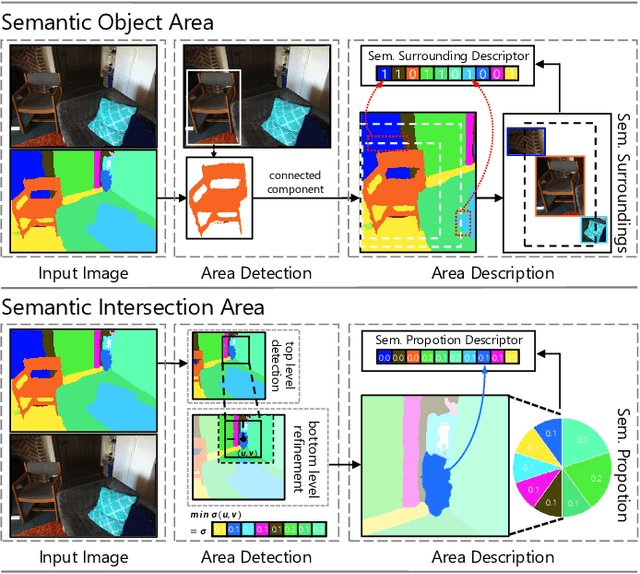

Feature matching is a crucial technique in computer vision. Essentially, it can be considered as a searching problem to establish correspondences between images. The key challenge in this task lies in the lack of a well-defined search space, leading to inaccurate point matching of current methods. In pursuit of a reasonable matching search space, this paper introduces a hierarchical feature matching framework: Area to Point Matching (A2PM), to first find semantic area matches between images, and then perform point matching on area matches, thus setting the search space as the area matches with salient features to achieve high matching precision. This proper search space of A2PM framework also alleviates the accuracy limitation in state-of-the-art Transformer-based matching methods. To realize this framework, we further propose Semantic and Geometry Area Matching (SGAM) method, which utilizes semantic prior and geometry consistency to establish accurate area matches between images. By integrating SGAM with off-the-shelf Transformer-based matchers, our feature matching methods, adopting the A2PM framework, achieve encouraging precision improvements in massive point matching and pose estimation experiments for present arts.