 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSDRL: Interpretable and Data-efficient Deep Reinforcement Learning Leveraging Symbolic Planning
Paper and Code
Nov 05, 2018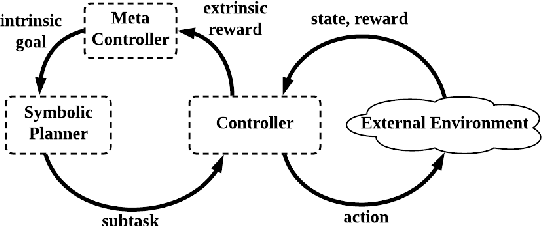
Deep reinforcement learning (DRL) has gained great success by learning directly from high-dimensional sensory inputs, yet is notorious for the lack of interpretability. Interpretability of the subtasks is critical in hierarchical decision-making as it increases the transparency of black-box-style DRL approach and helps the RL practitioners to understand the high-level behavior of the system better. In this paper, we introduce symbolic planning into DRL and propose a framework of Symbolic Deep Reinforcement Learning (SDRL) that can handle both high-dimensional sensory inputs and symbolic planning. The task-level interpretability is enabled by relating symbolic actions to options.This framework features a planner -- controller -- meta-controller architecture, which takes charge of subtask scheduling, data-driven subtask learning, and subtask evaluation, respectively. The three components cross-fertilize each other and eventually converge to an optimal symbolic plan along with the learned subtasks, bringing together the advantages of long-term planning capability with symbolic knowledge and end-to-end reinforcement learning directly from a high-dimensional sensory input. Experimental results validate the interpretability of subtasks, along with improved data efficiency compared with state-of-the-art approaches.