Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSDF-based RGB-D Camera Tracking in Neural Scene Representations
Paper and Code
May 04, 2022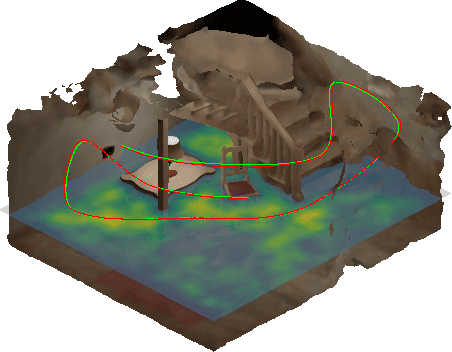


We consider the problem of tracking the 6D pose of a moving RGB-D camera in a neural scene representation. Different such representations have recently emerged, and we investigate the suitability of them for the task of camera tracking. In particular, we propose to track an RGB-D camera using a signed distance field-based representation and show that compared to density-based representations, tracking can be sped up, which enables more robust and accurate pose estimates when computation time is limited.
* Accepted to the "Motion Planning with Implicit Neural Representations
of Geometry" Workshop at ICRA 2022
View paper on