 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScore-based Data Assimilation
Paper and Code
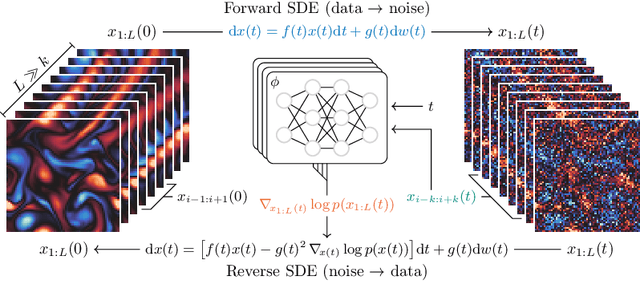


Data assimilation, in its most comprehensive form, addresses the Bayesian inverse problem of identifying plausible state trajectories that explain noisy or incomplete observations of stochastic dynamical systems. Various approaches have been proposed to solve this problem, including particle-based and variational methods. However, most algorithms depend on the transition dynamics for inference, which becomes intractable for long time horizons or for high-dimensional systems with complex dynamics, such as oceans or atmospheres. In this work, we introduce score-based data assimilation for trajectory inference. We learn a score-based generative model of state trajectories based on the key insight that the score of an arbitrarily long trajectory can be decomposed into a series of scores over short segments. After training, inference is carried out using the score model, in a non-autoregressive manner by generating all states simultaneously. Quite distinctively, we decouple the observation model from the training procedure and use it only at inference to guide the generative process, which enables a wide range of zero-shot observation scenarios. We present theoretical and empirical evidence supporting the effectiveness of our method.