 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalableMap: Scalable Map Learning for Online Long-Range Vectorized HD Map Construction
Paper and Code
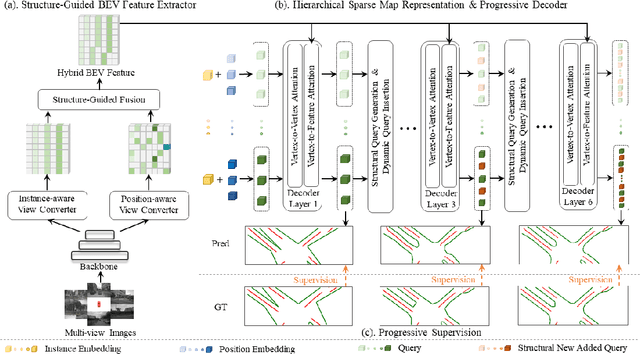
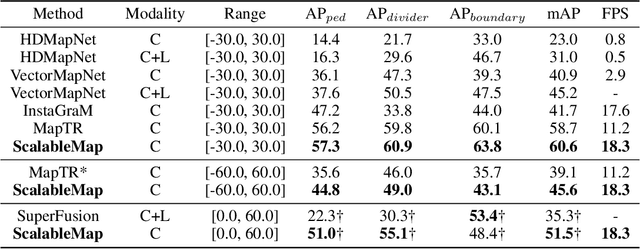
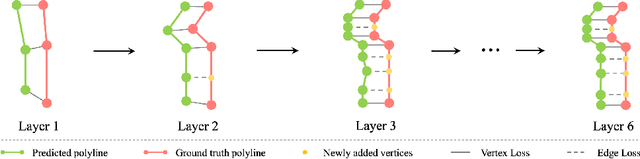
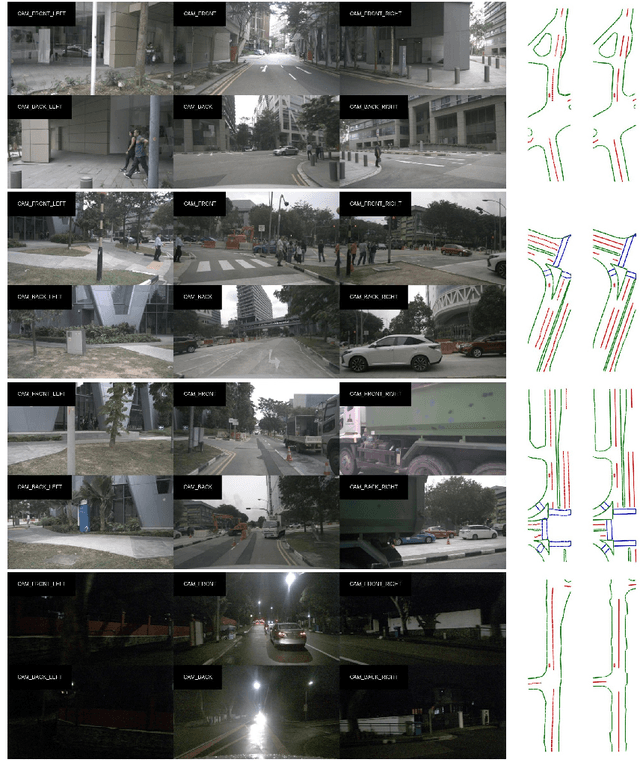
We propose a novel end-to-end pipeline for online long-range vectorized high-definition (HD) map construction using on-board camera sensors. The vectorized representation of HD maps, employing polylines and polygons to represent map elements, is widely used by downstream tasks. However, previous schemes designed with reference to dynamic object detection overlook the structural constraints within linear map elements, resulting in performance degradation in long-range scenarios. In this paper, we exploit the properties of map elements to improve the performance of map construction. We extract more accurate bird's eye view (BEV) features guided by their linear structure, and then propose a hierarchical sparse map representation to further leverage the scalability of vectorized map elements and design a progressive decoding mechanism and a supervision strategy based on this representation. Our approach, ScalableMap, demonstrates superior performance on the nuScenes dataset, especially in long-range scenarios, surpassing previous state-of-the-art model by 6.5 mAP while achieving 18.3 FPS. Code is available at https://github.com/jingy1yu/ScalableMap.