 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Synthesis of Verified Controllers in Deep Reinforcement Learning
Paper and Code
Apr 20, 2021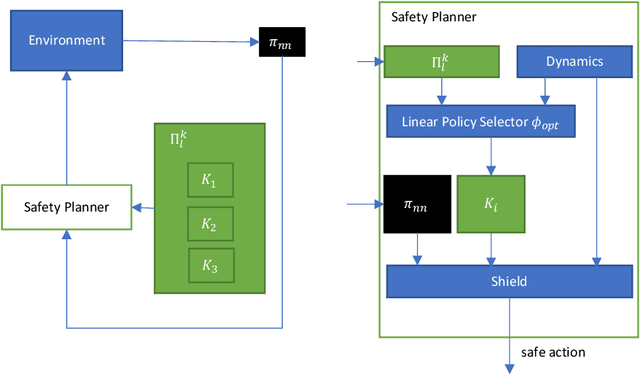


There has been significant recent interest in devising verification techniques for learning-enabled controllers (LECs) that manage safety-critical systems. Given the opacity and lack of interpretability of the neural policies that govern the behavior of such controllers, many existing approaches enforce safety properties through the use of shields, a dynamic monitoring and repair mechanism that ensures a LEC does not emit actions that would violate desired safety conditions. These methods, however, have shown to have significant scalability limitations because verification costs grow as problem dimensionality and objective complexity increase. In this paper, we propose a new automated verification pipeline capable of synthesizing high-quality safety shields even when the problem domain involves hundreds of dimensions, or when the desired objective involves stochastic perturbations, liveness considerations, and other complex non-functional properties. Our key insight involves separating safety verification from neural controller, using pre-computed verified safety shields to constrain neural controller training which does not only focus on safety. Experimental results over a range of realistic high-dimensional deep RL benchmarks demonstrate the effectiveness of our approach.