 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Object Detection on Embedded Devices Using Weight Pruning and Singular Value Decomposition
Paper and Code

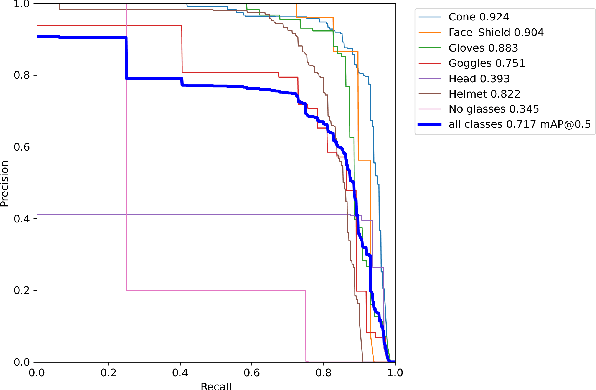
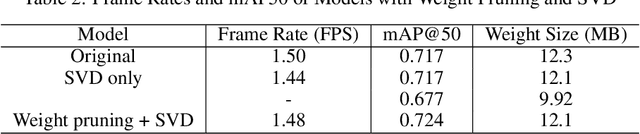
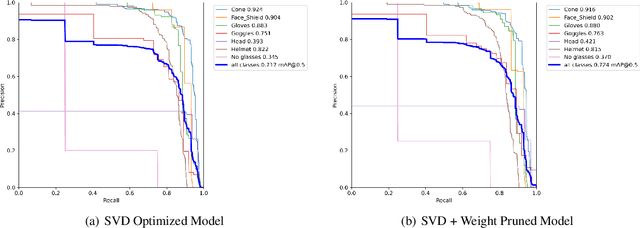
This paper presents a method for optimizing object detection models by combining weight pruning and singular value decomposition (SVD). The proposed method was evaluated on a custom dataset of street work images obtained from https://universe.roboflow.com/roboflow-100/street-work. The dataset consists of 611 training images, 175 validation images, and 87 test images with 7 classes. We compared the performance of the optimized models with the original unoptimized model in terms of frame rate, mean average precision (mAP@50), and weight size. The results show that the weight pruning + SVD model achieved a 0.724 mAP@50 with a frame rate of 1.48 FPS and a weight size of 12.1 MB, outperforming the original model (0.717 mAP@50, 1.50 FPS, and 12.3 MB). Precision-recall curves were also plotted for all models. Our work demonstrates that the proposed method can effectively optimize object detection models while balancing accuracy, speed, and model size.