 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Fiducial Tag Localization on a 3D Prior Map via Graph-Theoretic Global Tag-Map Registration
Paper and Code
Jul 25, 2022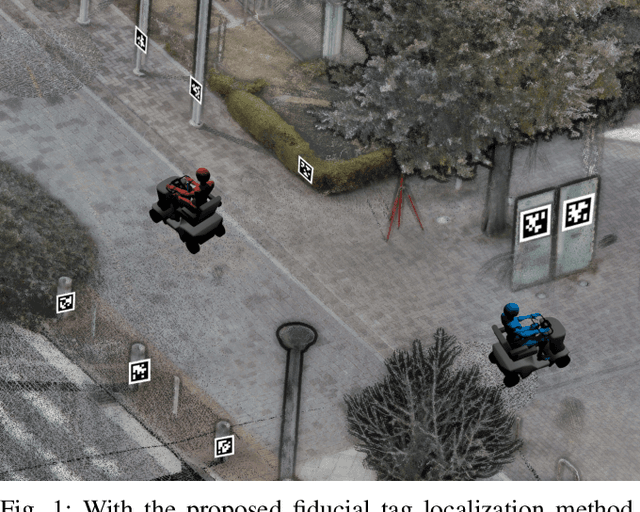
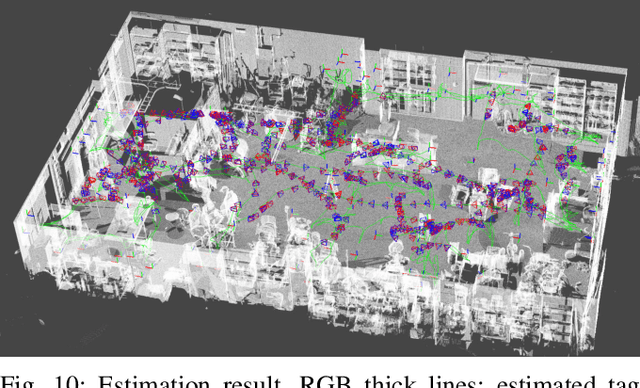
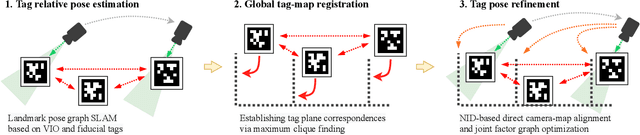
This paper presents an accurate and scalable method for fiducial tag localization on a 3D prior environmental map. The proposed method comprises three steps: 1) visual odometry-based landmark SLAM for estimating the relative poses between fiducial tags, 2) geometrical matching-based global tag-map registration via maximum clique finding, and 3) tag pose refinement based on direct camera-map alignment with normalized information distance. Through simulation-based evaluations, the proposed method achieved a 98 \% global tag-map registration success rate and an average tag pose estimation accuracy of a few centimeters. Experimental results in a real environment demonstrated that it enables to localize over 110 fiducial tags placed in an environment in 25 minutes for data recording and post-processing.