 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSalient Object Detection for Point Clouds
Paper and Code
Jul 25, 2022
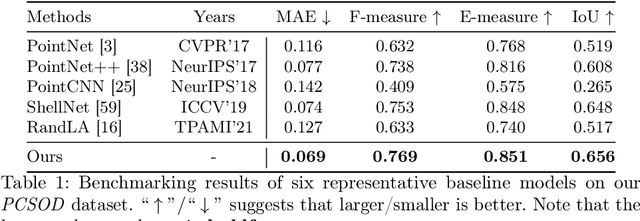

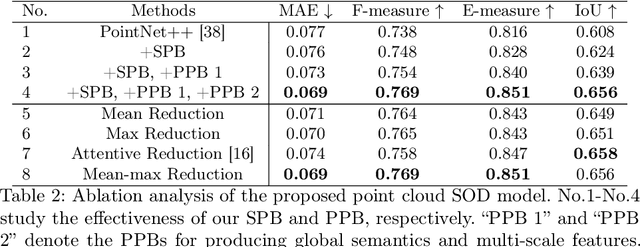
This paper researches the unexplored task-point cloud salient object detection (SOD). Differing from SOD for images, we find the attention shift of point clouds may provoke saliency conflict, i.e., an object paradoxically belongs to salient and non-salient categories. To eschew this issue, we present a novel view-dependent perspective of salient objects, reasonably reflecting the most eye-catching objects in point cloud scenarios. Following this formulation, we introduce PCSOD, the first dataset proposed for point cloud SOD consisting of 2,872 in-/out-door 3D views. The samples in our dataset are labeled with hierarchical annotations, e.g., super-/sub-class, bounding box, and segmentation map, which endows the brilliant generalizability and broad applicability of our dataset verifying various conjectures. To evidence the feasibility of our solution, we further contribute a baseline model and benchmark five representative models for a comprehensive comparison. The proposed model can effectively analyze irregular and unordered points for detecting salient objects. Thanks to incorporating the task-tailored designs, our method shows visible superiority over other baselines, producing more satisfactory results. Extensive experiments and discussions reveal the promising potential of this research field, paving the way for further study.