 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSaliency Driven Object recognition in egocentric videos with deep CNN
Paper and Code
Jun 23, 2016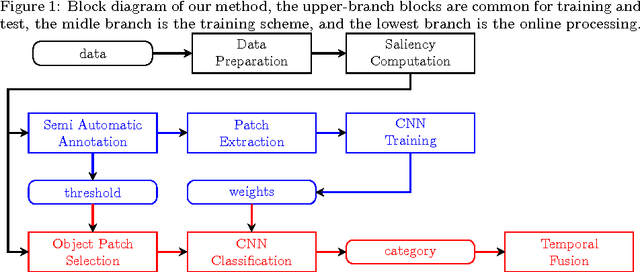


The problem of object recognition in natural scenes has been recently successfully addressed with Deep Convolutional Neuronal Networks giving a significant break-through in recognition scores. The computational efficiency of Deep CNNs as a function of their depth, allows for their use in real-time applications. One of the key issues here is to reduce the number of windows selected from images to be submitted to a Deep CNN. This is usually solved by preliminary segmentation and selection of specific windows, having outstanding "objectiveness" or other value of indicators of possible location of objects. In this paper we propose a Deep CNN approach and the general framework for recognition of objects in a real-time scenario and in an egocentric perspective. Here the window of interest is built on the basis of visual attention map computed over gaze fixations measured by a glass-worn eye-tracker. The application of this set-up is an interactive user-friendly environment for upper-limb amputees. Vision has to help the subject to control his worn neuro-prosthesis in case of a small amount of remaining muscles when the EMG control becomes unefficient. The recognition results on a specifically recorded corpus of 151 videos with simple geometrical objects show the mAP of 64,6\% and the computational time at the generalization lower than a time of a visual fixation on the object-of-interest.