 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafely Learning Dynamical Systems from Short Trajectories
Paper and Code
Nov 24, 2020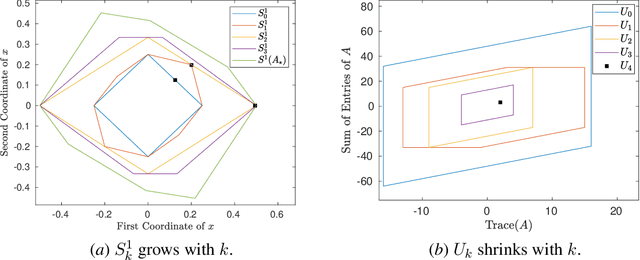
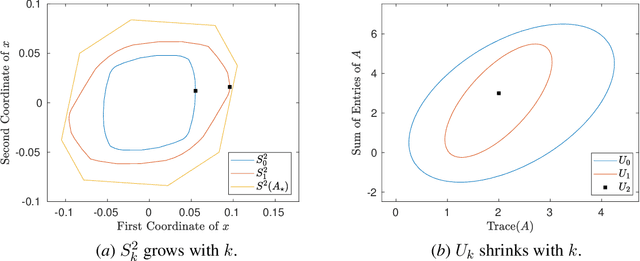
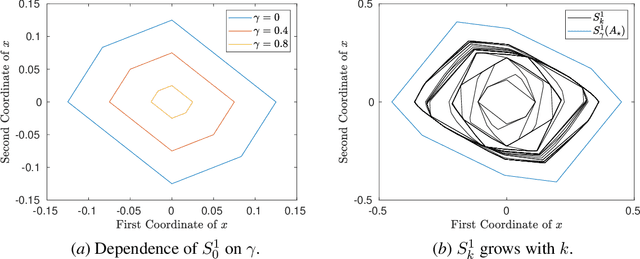
A fundamental challenge in learning to control an unknown dynamical system is to reduce model uncertainty by making measurements while maintaining safety. In this work, we formulate a mathematical definition of what it means to safely learn a dynamical system by sequentially deciding where to initialize the next trajectory. In our framework, the state of the system is required to stay within a given safety region under the (possibly repeated) action of all dynamical systems that are consistent with the information gathered so far. For our first two results, we consider the setting of safely learning linear dynamics. We present a linear programming-based algorithm that either safely recovers the true dynamics from trajectories of length one, or certifies that safe learning is impossible. We also give an efficient semidefinite representation of the set of initial conditions whose resulting trajectories of length two are guaranteed to stay in the safety region. For our final result, we study the problem of safely learning a nonlinear dynamical system. We give a second-order cone programming based representation of the set of initial conditions that are guaranteed to remain in the safety region after one application of the system dynamics.