Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Policy Search with Gaussian Process Models
Paper and Code
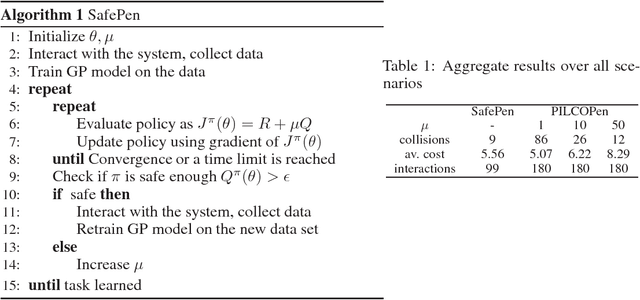
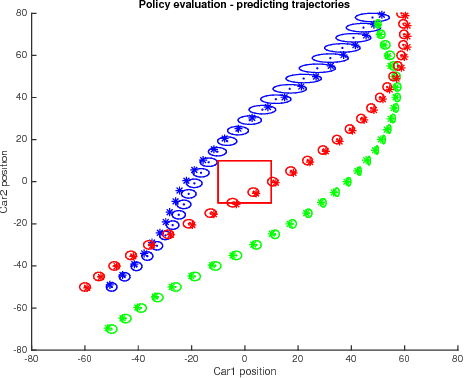
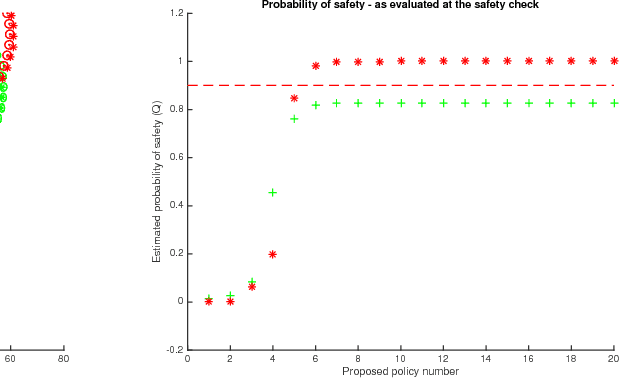
We propose a method to optimise the parameters of a policy which will be used to safely perform a given task in a data-efficient manner. We train a Gaussian process model to capture the system dynamics, based on the PILCO framework. Our model has useful analytic properties, which allow closed form computation of error gradients and estimating the probability of violating given state space constraints. During training, as well as operation, only policies that are deemed safe are implemented on the real system, minimising the risk of failure.
* 5 pages, 2 figures, presented in the NIPS 2017 workshop "Transparent
and Interpretable Machine Learning in Safety Critical Environments"
View paper on