Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Model Predictive Control Approach for Non-holonomic Mobile Robots
Paper and Code
Jul 26, 2022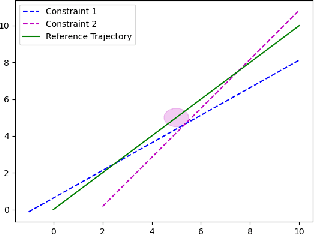
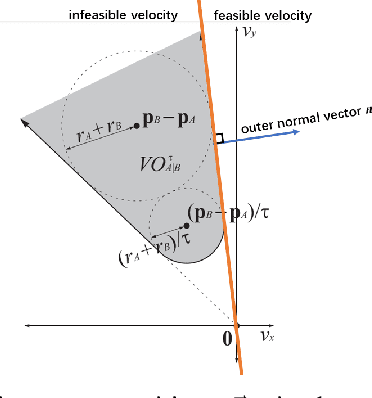
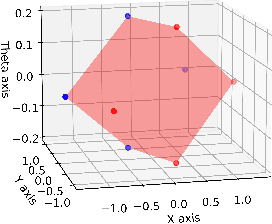

We design an MPC approach for non-holonomic mobile robots and analytically show that the time-varying, linearized system can yield asymptotic stability around the origin in the tracking task. For obstacle avoidance, we propose a constraint in velocity-space which explicitly couples the two control inputs based on the current state.
View paper on