 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Learning-based Observers for Unknown Nonlinear Systems using Bayesian Optimization
Paper and Code
May 12, 2020
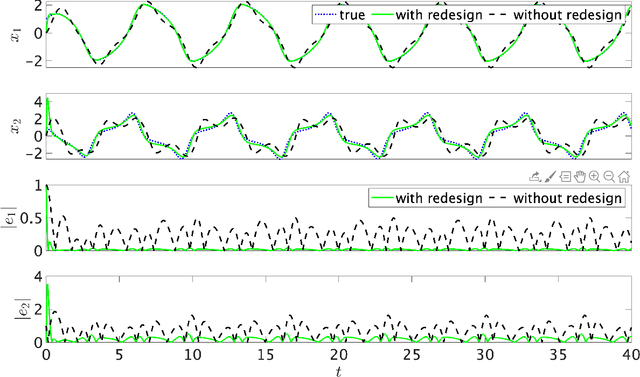
Data generated from dynamical systems with unknown dynamics enable the learning of state observers that are: robust to modeling error, computationally tractable to design, and capable of operating with guaranteed performance. In this paper, a modular design methodology is formulated, that consists of three design phases: (i) an initial robust observer design that enables one to learn the dynamics without allowing the state estimation error to diverge (hence, safe); (ii) a learning phase wherein the unmodeled components are estimated using Bayesian optimization and Gaussian processes; and, (iii) a re-design phase that leverages the learned dynamics to improve convergence rate of the state estimation error. The potential of our proposed learning-based observer is demonstrated on a benchmark nonlinear system. Additionally, certificates of guaranteed estimation performance are provided.