Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAD-GAN: Synthetic Autonomous Driving using Generative Adversarial Networks
Paper and Code
Nov 27, 2016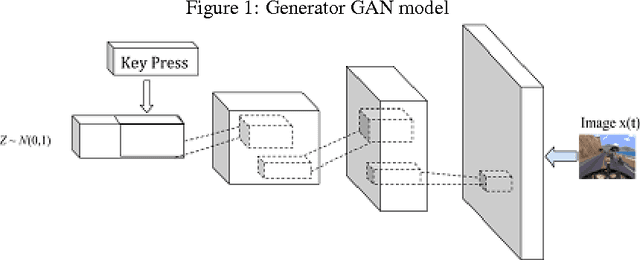
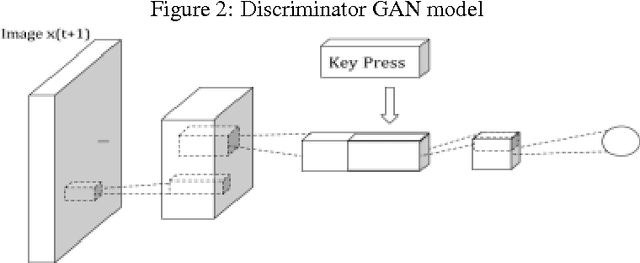
Autonomous driving is one of the most recent topics of interest which is aimed at replicating human driving behavior keeping in mind the safety issues. We approach the problem of learning synthetic driving using generative neural networks. The main idea is to make a controller trainer network using images plus key press data to mimic human learning. We used the architecture of a stable GAN to make predictions between driving scenes using key presses. We train our model on one video game (Road Rash) and tested the accuracy and compared it by running the model on other maps in Road Rash to determine the extent of learning.
* 5 pages; 4 figures; Accepted at the Deep Learning for Action and
Interaction Workshop, 30th Conference on Neural Information Processing
Systems (NIPS 2016), Barcelona, Spain; All authors have equal contribution
View paper on