 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSA-reCBS: Multi-robot task assignment with integrated reactive path generation
Paper and Code
Apr 13, 2023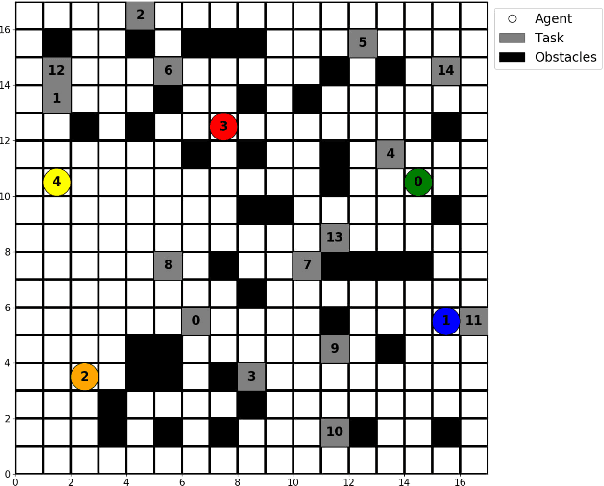
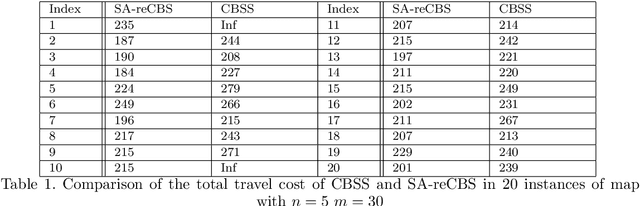
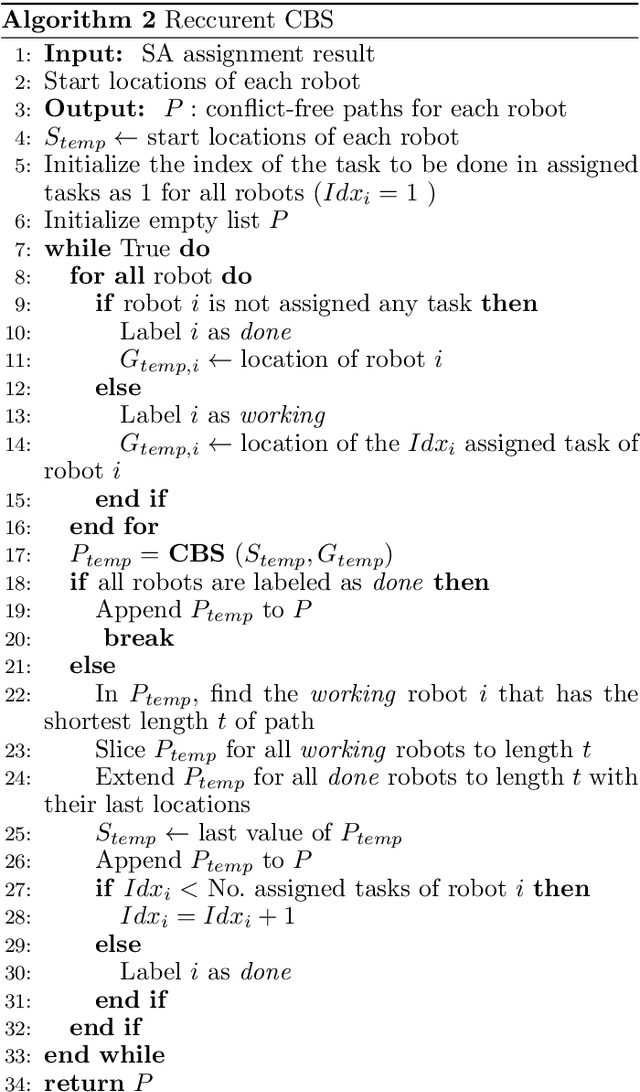
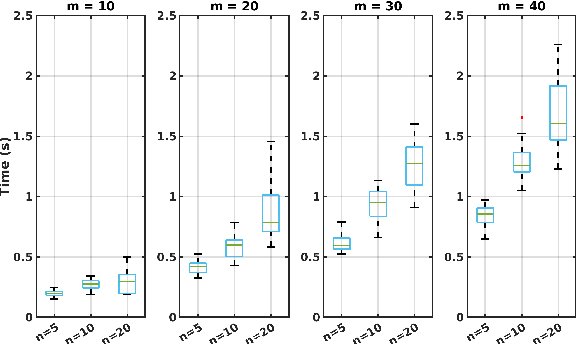
In this paper, we study the multi-robot task assignment and path-finding problem (MRTAPF), where a number of agents are required to visit all given goal locations while avoiding collisions with each other. We propose a novel two-layer algorithm SA-reCBS that cascades the simulated annealing algorithm and conflict-based search to solve this problem. Compared to other approaches in the field of MRTAPF, the advantage of SA-reCBS is that without requiring a pre-bundle of goals to groups with the same number of groups as the number of robots, it enables a part of agents needed to visit all goals in collision-free paths. We test the algorithm in various simulation instances and compare it with state-of-the-art algorithms. The result shows that SA-reCBS has a better performance with a higher success rate, less computational time, and better objective values.