 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRTMaps-based Local Dynamic Map for multi-ADAS data fusion
Paper and Code
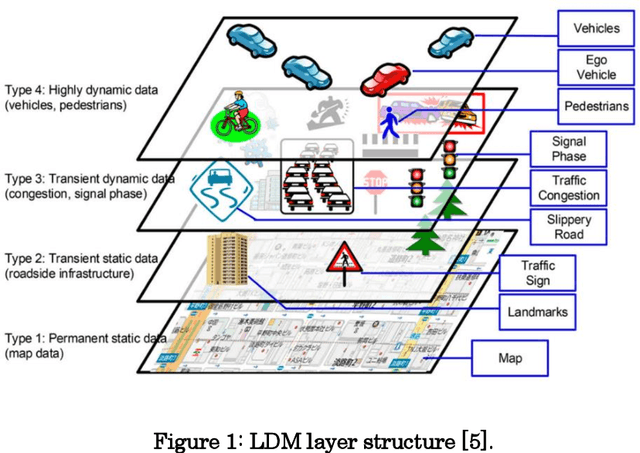
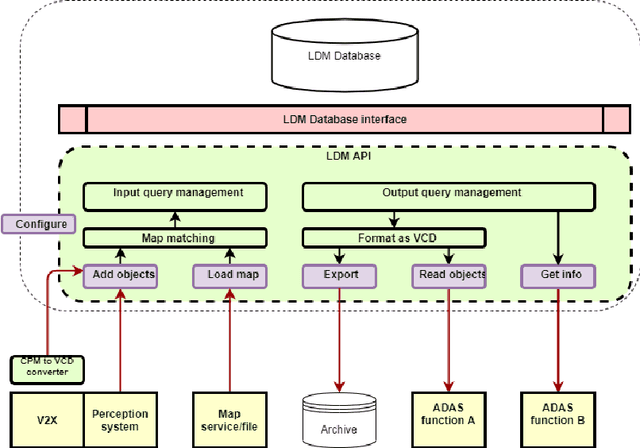
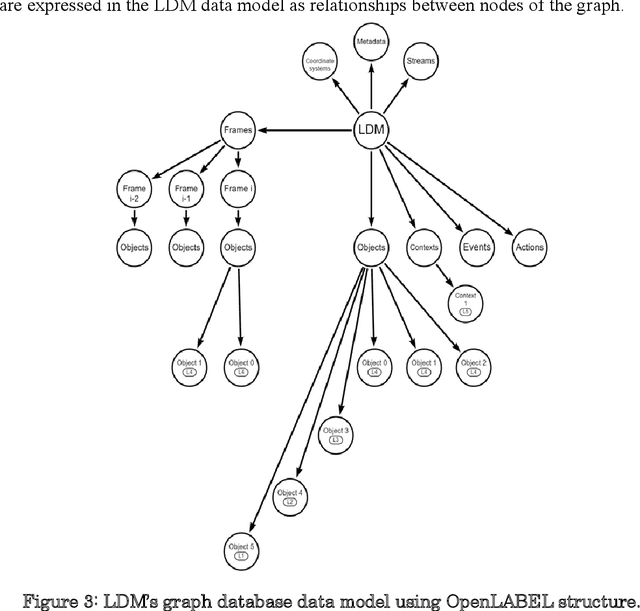
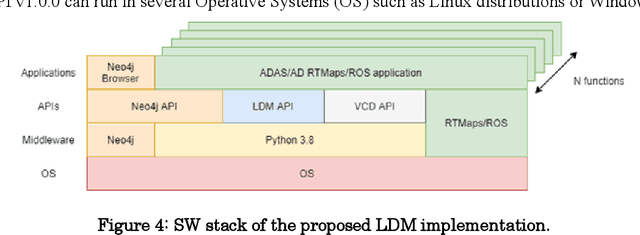
Work on Local Dynamic Maps (LDM) implementation is still in its early stages, as the LDM standards only define how information shall be structured in databases, while the mechanism to fuse or link information across different layers is left undefined. A working LDM component, as a real-time database inside the vehicle is an attractive solution to multi-ADAS systems, which may feed a real-time LDM database that serves as a central point of information inside the vehicle, exposing fused and structured information to other components (e.g., decision-making systems). In this paper we describe our approach implementing a real-time LDM component using the RTMaps middleware, as a database deployed in a vehicle, but also at road-side units (RSU), making use of the three pillars that guide a successful fusion strategy: utilisation of standards (with conversions between domains), middlewares to unify multiple ADAS sources, and linkage of data via semantic concepts.