 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRosella: A Self-Driving Distributed Scheduler for Heterogeneous Clusters
Paper and Code
Nov 10, 2020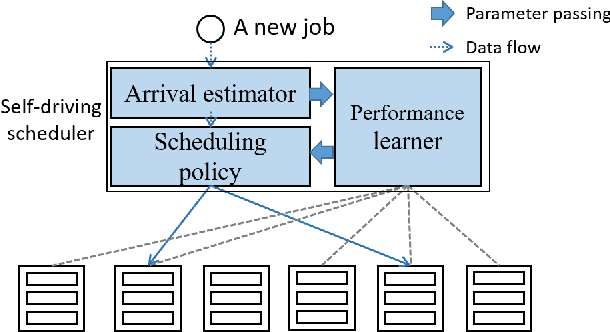
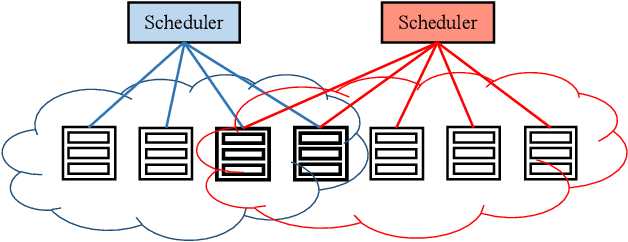
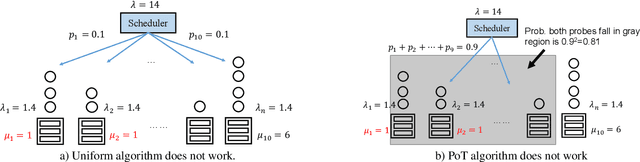
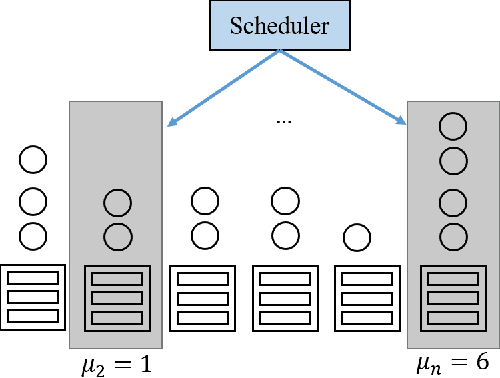
Large-scale interactive web services and advanced AI applications make sophisticated decisions in real-time, based on executing a massive amount of computation tasks on thousands of servers. Task schedulers, which often operate in heterogeneous and volatile environments, require high throughput, i.e., scheduling millions of tasks per second, and low latency, i.e., incurring minimal scheduling delays for millisecond-level tasks. Scheduling is further complicated by other users' workloads in a shared system, other background activities, and the diverse hardware configurations inside datacenters. We present Rosella, a new self-driving, distributed approach for task scheduling in heterogeneous clusters. Our system automatically learns the compute environment and adjust its scheduling policy in real-time. The solution provides high throughput and low latency simultaneously, because it runs in parallel on multiple machines with minimum coordination and only performs simple operations for each scheduling decision. Our learning module monitors total system load, and uses the information to dynamically determine optimal estimation strategy for the backends' compute-power. Our scheduling policy generalizes power-of-two-choice algorithms to handle heterogeneous workers, reducing the max queue length of $O(\log n)$ obtained by prior algorithms to $O(\log \log n)$. We implement a Rosella prototype and evaluate it with a variety of workloads. Experimental results show that Rosella significantly reduces task response times, and adapts to environment changes quickly.