 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRomanian Speech Recognition Experiments from the ROBIN Project
Paper and Code
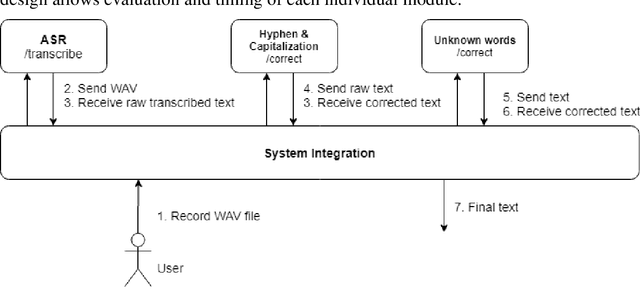
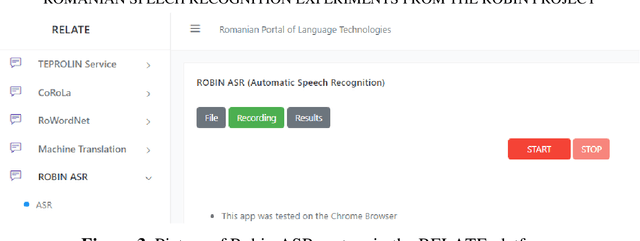
One of the fundamental functionalities for accepting a socially assistive robot is its communication capabilities with other agents in the environment. In the context of the ROBIN project, situational dialogue through voice interaction with a robot was investigated. This paper presents different speech recognition experiments with deep neural networks focusing on producing fast (under 100ms latency from the network itself), while still reliable models. Even though one of the key desired characteristics is low latency, the final deep neural network model achieves state of the art results for recognizing Romanian language, obtaining a 9.91% word error rate (WER), when combined with a language model, thus improving over the previous results while offering at the same time an improved runtime performance. Additionally, we explore two modules for correcting the ASR output (hyphen and capitalization restoration and unknown words correction), targeting the ROBIN project's goals (dialogue in closed micro-worlds). We design a modular architecture based on APIs allowing an integration engine (either in the robot or external) to chain together the available modules as needed. Finally, we test the proposed design by integrating it in the RELATE platform and making the ASR service available to web users by either uploading a file or recording new speech.