 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobustifying the Multi-Scale Representation of Neural Radiance Fields
Paper and Code
Oct 09, 2022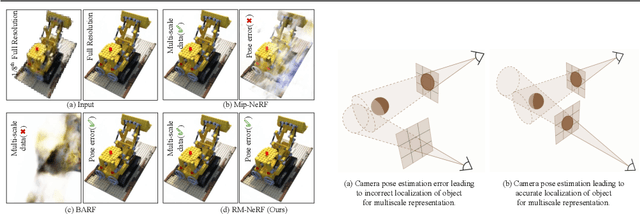



Neural Radiance Fields (NeRF) recently emerged as a new paradigm for object representation from multi-view (MV) images. Yet, it cannot handle multi-scale (MS) images and camera pose estimation errors, which generally is the case with multi-view images captured from a day-to-day commodity camera. Although recently proposed Mip-NeRF could handle multi-scale imaging problems with NeRF, it cannot handle camera pose estimation error. On the other hand, the newly proposed BARF can solve the camera pose problem with NeRF but fails if the images are multi-scale in nature. This paper presents a robust multi-scale neural radiance fields representation approach to simultaneously overcome both real-world imaging issues. Our method handles multi-scale imaging effects and camera-pose estimation problems with NeRF-inspired approaches by leveraging the fundamentals of scene rigidity. To reduce unpleasant aliasing artifacts due to multi-scale images in the ray space, we leverage Mip-NeRF multi-scale representation. For joint estimation of robust camera pose, we propose graph-neural network-based multiple motion averaging in the neural volume rendering framework. We demonstrate, with examples, that for an accurate neural representation of an object from day-to-day acquired multi-view images, it is crucial to have precise camera-pose estimates. Without considering robustness measures in the camera pose estimation, modeling for multi-scale aliasing artifacts via conical frustum can be counterproductive. We present extensive experiments on the benchmark datasets to demonstrate that our approach provides better results than the recent NeRF-inspired approaches for such realistic settings.