 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Shape Registration using Fuzzy Correspondences
Paper and Code
Feb 18, 2017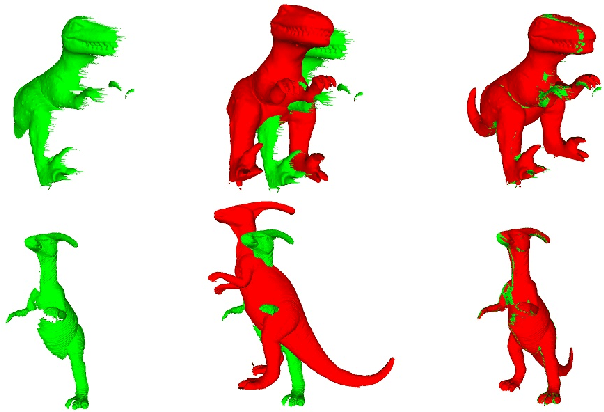
Shape registration is the process of aligning one 3D model to another. Most previous methods to align shapes with no known correspondences attempt to solve for both the transformation and correspondences iteratively. We present a shape registration approach that solves for the transformation using fuzzy correspondences to maximize the overlap between the given shape and the target shape. A coarse to fine approach with Levenberg-Marquardt method is used for optimization. Real and synthetic experiments show our approach is robust and outperforms other state of the art methods when point clouds are noisy, sparse, and have non-uniform density. Experiments show our method is more robust to initialization and can handle larger scale changes and rotation than other methods. We also show that the approach can be used for 2D-3D alignment via ray-point alignment.