 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Object Detection under Occlusion with Context-Aware CompositionalNets
Paper and Code
May 30, 2020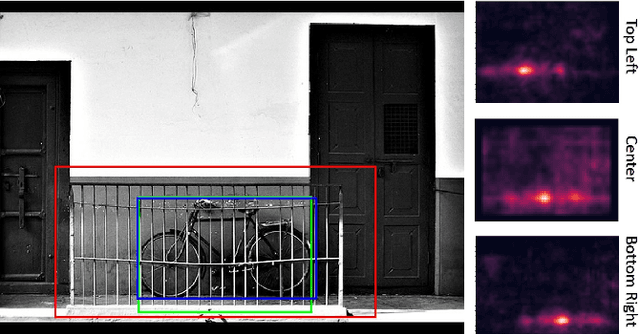
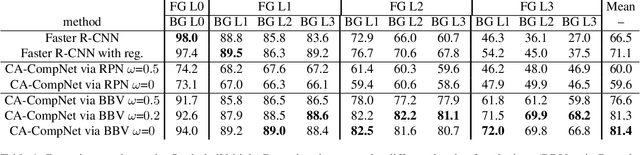
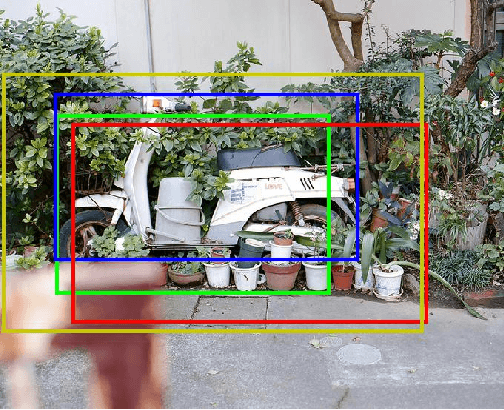
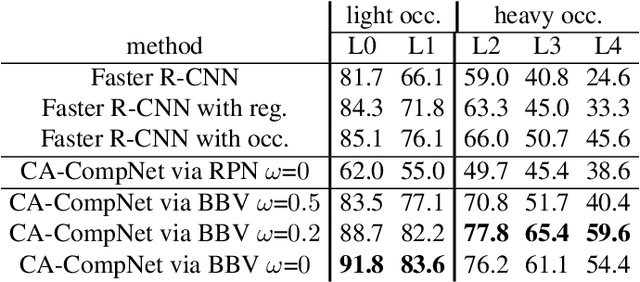
Detecting partially occluded objects is a difficult task. Our experimental results show that deep learning approaches, such as Faster R-CNN, are not robust at object detection under occlusion. Compositional convolutional neural networks (CompositionalNets) have been shown to be robust at classifying occluded objects by explicitly representing the object as a composition of parts. In this work, we propose to overcome two limitations of CompositionalNets which will enable them to detect partially occluded objects: 1) CompositionalNets, as well as other DCNN architectures, do not explicitly separate the representation of the context from the object itself. Under strong object occlusion, the influence of the context is amplified which can have severe negative effects for detection at test time. In order to overcome this, we propose to segment the context during training via bounding box annotations. We then use the segmentation to learn a context-aware CompositionalNet that disentangles the representation of the context and the object. 2) We extend the part-based voting scheme in CompositionalNets to vote for the corners of the object's bounding box, which enables the model to reliably estimate bounding boxes for partially occluded objects. Our extensive experiments show that our proposed model can detect objects robustly, increasing the detection performance of strongly occluded vehicles from PASCAL3D+ and MS-COCO by 41% and 35% respectively in absolute performance relative to Faster R-CNN.