 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Combination of Local Controllers
Paper and Code
Jan 10, 2013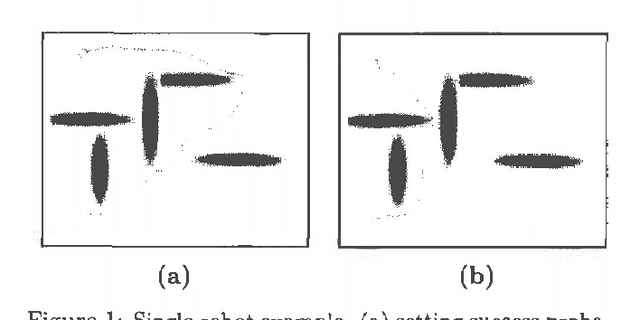
Planning problems are hard, motion planning, for example, isPSPACE-hard. Such problems are even more difficult in the presence of uncertainty. Although, Markov Decision Processes (MDPs) provide a formal framework for such problems, finding solutions to high dimensional continuous MDPs is usually difficult, especially when the actions and time measurements are continuous. Fortunately, problem-specific knowledge allows us to design controllers that are good locally, though having no global guarantees. We propose a method of nonparametrically combining local controllers to obtain globally good solutions. We apply this formulation to two types of problems : motion planning (stochastic shortest path) and discounted MDPs. For motion planning, we argue that usual MDP optimality criterion (expected cost) may not be practically relevant. Wepropose an alternative: finding the minimum cost path,subject to the constraint that the robot must reach the goal withhigh probability. For this problem, we prove that a polynomial number of samples is sufficient to obtain a high probability path. For discounted MDPs, we propose a formulation that explicitly deals with model uncertainty, i.e., the problem introduced when transition probabilities are not known exactly. We formulate the problem as a robust linear program which directly incorporates this type of uncertainty.