 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
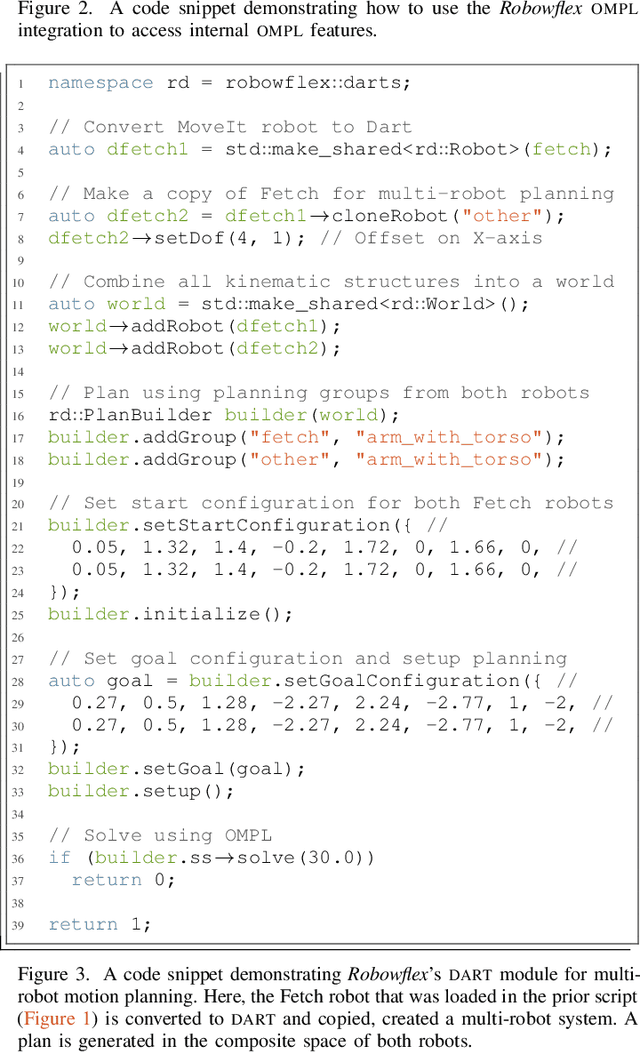
Add to EdgeRobowflex: Robot Motion Planning with MoveIt Made Easy
Paper and Code



Robowflex is a software library for robot motion planning in industrial and research applications, leveraging the popular MoveIt library and Robot Operating System (ROS) middleware. Robowflex takes advantage of the ease of motion planning with MoveIt while providing an augmented API to craft and manipulate motion planning queries within a single program. Robowflex's high-level API simplifies many common use-cases while still providing access to the underlying MoveIt library. Robowflex is particularly useful for 1) developing new motion planners, 2) evaluation of motion planners, and 3) complex problems that use motion planning (e.g., task and motion planning). Robowflex also provides visualization capabilities, integrations to other robotics libraries (e.g., DART and Tesseract), and is complimentary to many other robotics packages. With our library, the user does not need to be an expert at ROS or MoveIt in order to set up motion planning queries, extract information from results, and directly interface with a variety of software components. We provide a few example use-cases that demonstrate its efficacy.